ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Уравнения движения гироскопа
В соответствии с теорией сложения скоростей, произведем сложение всех проекций угловых скоростей по осям гироскопа.
Алгебраическая сумма проекций угловых скоростей относительного (34) и переносного (49) движений на ось Y гироскопа равна проекции угловой скорости абсолютного движения ωру (51) на ту же ось Y:
 . (53)
. (53)
Алгебраическая сумма проекций угловых скоростей относительного (35) и переносного (50) движений на ось Z гироскопа равна проекции угловой скорости абсолютного движения ωpz (52) на ту же ось Z:
 . (54)
. (54)
Уравнения (53) и (54), связывающие относительные угловые скорости α и β с переносными (остальные слагаемые левых частей уравнений) и абсолютными ωру и ωрz называются уравнениями движения гироскопа.
Первые слагаемые уравнений характеризуют угловую скорость вращения главной оси гироскопа относительно земных плоскостей (ГСК). Последующие слагаемые левых частей уравнений определяют угловые скорости вращения земных плоскостей относительно инерциального пространства. Правые части уравнений характеризуют угловую скорость перемещения главной оси гироскопа относительно инерциального пространства. Перепишем технические уравнения гироскопа (11) в виде:
 . (55)
. (55)
Сравнивая уравнения,(53), (54) с уравнениями (55), видно, что те и другие, выражают один и тот же закон движения главной оси гироскопа в инерциальном пространстве.
Уравнения.(55) более строго описывают движение гироскопа, так как учитывают инерционные, члены, характеризующие нутационные колебания главной оси гироскопа.
Выведенные уравнения (53) и (54) не учитывают нутацию, но хорошо раскрывают физическую сущность движения гироскопа относительно земных плоскостей; более удобны для объяснения принципа работы навигационных гироскопических устройств и для производства расчетов.
Некоторые навигационные приборы и системы имеют гироскопические элементы, состоящие из нескольких гироскопов, например, гиросфера гирокомпаса типа «Курс».
Конструкция таких элементов позволяет им прецессировать не только вокруг осей У и Z, но и вокруг оси X с угловой скоростью ωрх. В этом случае необходимо учитывать и вращение ГСК вокруг оси X. Напишем третье уравнение движения названного выше гироскопического элемента вокруг оси Х с учетом зависимостей (35а), (36) и (48);
 . (56)
. (56)
В заключение лекции следует отметить, что для свободного гироскопа с тремя степенями свободы правые части уравнений (63) и (64) не равны 0. Это означает, что главная ось свободного гироскопа не сохраняет постоянства направления относительно земных плоскостей; она непрерывно изменяет азимут и высоту. Следовательно, свободный гироскоп нельзя на длительное время использовать в качестве указателя направления, если нет дополнительных устройств, учитывающих видимый уход главной оси от первоначального положения.
ЛЕКЦИЯ 6
ГИРОСКОПЫ, ПРИМЕНЯЕМЫЕ В НАВИГАЦИОННЫХ ПРИБОРАХ И
СИСТЕМАХ
Гироскопы, применяемые в навигационных приборах и системах (НПС), выполняются, как правило, в виде гиромоторов.
В зависимости от конструкции гироскопы подразделяются на осевые, шаровые и поплавковые и т.д.
Такое разнообразие конструкций гироскопов объясняется условиями их применения и требуемой точностью работа. Большое распространение в НПС получили электрические гиромоторы на переменном токе. Необходимая скорость вращения ротора такого гироскопа определяется скоростью вращения магнитного поля статора. Большинство электрических гиромоторов переменного тока представляет собой асинхронные двигатели.
Рассмотрим конструкции гироскопов, применяемые в НПС в настоящее время, и перспективных гироскопов, которые (ждут своей практической реализации).
1. Конструкция осевого гироскопа
Осевые гироскопы, выполненные в виде гиромоторов на переменном токе, нашли широкое применение в гирокомпасах (ГК) гироазимутах (ГА), гиромагнитных компасах (ГМК), гиростабилизаторах и т.д.
Гиромотор состоит из следующих основных частей: ротора 1, статора 2 и гирокамеры 3 (рис. 17). 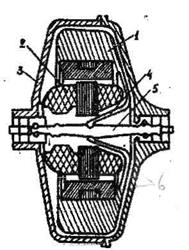 Для увеличения момента инерции ротор имеет ободообразную форму. Основная масса ротора размещена в ободе, а следовательно, удалена от оси вращения. Обод ротора соединяется диафрагмой 4 с осью 5. По внутреннему диаметру ротора к его телу крепится короткозамкнутая обмотка типа"беличье колесо"6.
Для увеличения момента инерции ротор имеет ободообразную форму. Основная масса ротора размещена в ободе, а следовательно, удалена от оси вращения. Обод ротора соединяется диафрагмой 4 с осью 5. По внутреннему диаметру ротора к его телу крепится короткозамкнутая обмотка типа"беличье колесо"6.
Ось ротора устанавливается в подшипниках, смонтированных в гирокамере. К корпусу гирокамеры крепится статор 2, входящий внутрь ротора 1.
При работе гиромотора в осях подвеса возникают моменты сил трения. Кроме того, возможно смещение центра тяже-
Рис.17 сти гироскопа относительно точки подвеса вследствие неточности балансировки ротора, изменения температурного режима и т.д.
Эти причины вызывают появление "вредных" моментов внешних сил, которые создают прецессию гироскопа, в результате чего его главная ось уходит от своего первоначального направления. Уход главной оси гироскопа от первоначального положения вследствие воздействия "вредных" моментов внешних сил называется дрейфом гироскопа. Следовательно, дрейф является качественным показателем гироскопа. Чем меньше дрейф, тем выше качество гироскопа, и наоборот, дрейф гироскопа отрицательно действует на точность показаний гироскопических приборов. Стремлением повысить точность работы приборов обусловлено создание качественно новых типов гироскопов, основанных на различных принципах и физических явлениях. Разработаны гироскопы поплавкового типа и шаровые гироскопы с аэродинамическим подвесом, которые успешно применяется в навигационных гироскопических приборах.
Не нашли, что искали? Воспользуйтесь поиском: