ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Переходные процессы в ЭП. Определение Тэ и Тм и времени переходного процесса tп,tт,tв.
Переменный режим работы электропривода вызывает возникновение переходного процесса, оказывающего влияние на его работу. Переходным процессом в электроприводах называется процесс перехода из одного установившегося режима в другой.
Анализ переходных процессов позволяет определить условия получения максимальной производительности и качества выпускаемой продукции на данном технологическом оборудовании.
Практический интерес представляют также изменения во времени и максимальные значения вращающего момента М, тока I, мощности Р, нагрева отдельных частей и двигателя в целом. Все эти электрические и механические показатели взаимосвязаны и определяют производительность, надежность и экономичность электропривода в эксплуатации.
На протекание переходных процессов в электроприводах влияют различные виды инерционности: электромагнитные, механические и тепловые, которые в конечном итоге оказывают на процессы замедляющее действие. Степень влияния каждой инерционности характеризуется постоянными времени: электромеханической Тм, электромагнитной Тэ и тепловой Тт.
При анализе основных переходных режимов, как правило, учитываются механические и электромагнитные инерционности, так как тепловые инерционности значительно (на несколько порядков) больше вышеназванных.
. В большинстве случаев электромагнитная постоянная времени Тэ=L/R — (где L - индуктивность силовой цепи электродвигателя, Гн; R - общее суммарное сопротивление силовой цепи двигателя, Ом) достаточно мала (Тэ примерно = 0), а электромеханическая постоянная времени привода Тм имеет достаточно большое значение Тм >> Тэ. В расчетах переходных процессов можно учитывать только Ти, которая выражается в секундах и характеризует интенсивность протекания переходного процесса, т. е. время, за которое электропривод, обладая моментом инерции J, разгоняется от неподвижного состояния до скорости идеального холостого хода под действием неизменного момента, равного начальному пусковому моменту:
Тм=(J  0)/Мп.нач.
0)/Мп.нач.
Определение времени пуска и торможения. Временем пуска называется время, за которое электропривод разгоняется от скорости 0=0 до скорости, соответствующей установившемуся режиму работы, т. е. до скорости 2= у. Если привод разгоняется до номинальной скорости, тогда 2 = у = н, и время пуска определяется выражением
Определение времени пуска и торможения. Временем пуска называется время, за которое электропривод разгоняется от скорости 0=0 до скорости, соответствующей установившемуся режиму работы, т. е. до скорости 2= у. Если привод разгоняется до номинальной скорости, тогда 2 = у = н, и время пуска определяется выражением
tп=(J н)/(Мп.ср – Мс.ср), (1.18)
где J-общий момент инерции привода,кг*м2;Мп.ср.-среднее значение вращающего момента за время пуска, Н*м; Мс.ср. - среднее значение момента сопротивления машины, приведенное к валу двигателя, Н*м.
Временем торможения называется время, за которое электропривод замедляет скорость от установившегося значения скорости 2 = у (в частном случае 2 = н) до скорости, равной нулю 1 = 0, под действием тормозных моментов и момента сопротивления, и определяется выражением
tт=(J н)/(Мт.эл.ср.+Мс.ср.+Мт.мех.ср.), (1.19)
где Мт.эл.ср - среднее значение тормозного момента, развиваемого электрической машиной за время торможения, Н*м; Мт.мех.ср - среднее значение тормозного момента, развиваемого электромеханическим тормозом за время торможения, Н*м.
Если в электроприводе отсутствует принудительное торможение (Мт.эл., Мт.мех.= 0), тогда время замедления привода называется временем свободного выбега и из (1.19) следует
tв=(J н)/(Мс.ср.) (1.20)
☻ 4. Определение зависимости (t), I(t), M(t) в переходных процессах ЭП постоянного тока
Определение времени пуска и торможения электропривода постоянного тока. В электроприводах полиграфических машин необходимым условием является обеспечение плавного нарастания скорости от нуля до заданного значения во всех режимах работы машины.
В современных приводах это обеспечивается плавным нарастанием напряжения якоря, кроме того, необходимо обеспечить постоянство тока якоря в течение всего времени разгона. Обычно Iп = (1,2-1,3)Iн, тогда среднее значение тока в процессе пуска Iср =Iп и Мп.ср = Iсp = (1,2-1,3)Мн. Здесь с— постоянная электродвигателя.
Среднее значение момента сопротивления равно
Mc.cp.=(Mc0+Mc.н)/2 (1.21)
где Мс0 и Мс.н. - моменты сопротивления машины, приведенные к валу двигателя при =0 и = н соответственно (определяются по механической характеристике машины М=f (). Время разгона электропривода определяется по формуле (1.18).
В полиграфических машинах, как правило, используют принудительное торможение с помощью электромеханического тормоза и электрическое торможение (динамическое или рекуперативное). Электромеханический тормоз создает постоянный тормозной момент, зависящий от его конструктивных параметров. Динамическое или рекуперативное торможение осуществляется переводом электрической машины из двигательного режима работы в генераторный после подачи команды «Стоп». Начальное значение тока якоря, а следовательно, и тормозного момента, зависит от тормозного сопротивления (при динамическом торможении) и параметров управляющего воздействия инвертора (при рекуперативном торможении). Среднее значение тормозного момента М.т.эл.ср=0,5Мт.эл.нач, а время торможения определяется по формуле (1.19).
Определение времени пуска и торможения в электроприводах переменного тока осуществляется по тем же формулам, что и для ДПТ.
Значение среднего вращающего момента за время пуска определяется как полусумма начального пускового и критического моментов (паспортные данные):
Мп=(Мп+Мк)/2=( пМн+ кМн)/2 (1.22)
пМн+ кМн)/2 (1.22)
Электрическое торможение в электроприводах переменного тока, как правило, динамическое. При этом обмотки статора отключаются от источника питания, и по одной или нескольким обмоткам обеспечивается протекание постоянного тока.
Аналитический расчет времени торможения достаточно сложный из-за отсутствия в каталогах и справочниках ряда параметров двигателей. Поэтому расчет базируется на эмпирических соотношениях. Так, при тормозном токе Iт=2Iн, где Iн - номинальный ток статора, максимальный тормозной момент Мт.эл.max=Mк, а среднее значение тормозного момента Мт.эл.ср.=0,3Мн
Для электроприводов с асинхронным двигателем с фазным ротором Наибольшее среднее значение тормозного момента М. эл с можно полу 



 чить при введении в цепь ротора дополнительного сопротивления, при котором Sкр ~ 0,5, и токе подмагничивания Iт. = 2 Iн (максимально допустимый тормозной ток), тогда М т. эл с = 0,7 Мн.
чить при введении в цепь ротора дополнительного сопротивления, при котором Sкр ~ 0,5, и токе подмагничивания Iт. = 2 Iн (максимально допустимый тормозной ток), тогда М т. эл с = 0,7 Мн.
Зависимость скорости и вращающего момента двигателя от времени можно рассчитать аналитически, если механические характеристики двигателя и механизма линейны, а момент сопротивления машины Мс (рис. 1.8), приведенный к валу двигателя, постоянен.




 Рис. 1.8. Механические характеристики электропривода при линейных характеристиках ДПТ и рабочей машины (Мс = const)
Рис. 1.8. Механические характеристики электропривода при линейных характеристиках ДПТ и рабочей машины (Мс = const)
Динамический момент в этом случае является функцией скорости, т. е.
Мдин=k( 0-  - ). (1.23)
- ). (1.23)
Здесь k -коэффициент пропорциональности, определяемый по начальным условиям.Перепад скорости в зависимости от Мc равен = 0- , где 0 - скорость идеального холостого хода; — текущее значение скорости двигателя.
Если Мс = 0 и = 0, то
Мдин =k( о- ) (1-24)
В начальный момент пуска = 0 и Мдин =Мдин max=Мп, поэтому из
уравнения (1.23) следует Мдин mах = k у,откуда k=Мдинmax/ у Подставляя значение k в (1.24), получим
Мдин=(Мдин max/ 0)*( у- ) (1.25)
Исходя из того, что Мдин =J(d /dt)и разделяя переменные
dt=J(d /Mдин),определим время, в течение к-ого скорость электропривода достигает значения :
 (1.26)
(1.26)
где нач — скорость в начале переходного процесса
 (1.27)
(1.27)
Где Тм=J/k=(J/Mдин max) у=J 0/Мп –электромеханическая постоянная времени электропривода.
Решая уравнение (1.27) относительно , найдём
= у(1-е-t/Tм)+ нач*е-t/Tм (1.28)
Если разгон происходит от нач=0, тогда уравнение (1.28) примет вид
= у(1 + e-t/Tм), (1.29)
т. е. характер изменения скорости экспоненциальный (рис. 1.9).
Рис.1.9 Зависимости ,М,I=f(t)для ЭП с линейными характеристиками
Помимо характера изменения скорости важно знать закон изменения вращающего момента, развиваемого двигателем в функции времени, т. e.M = f(t). Подставляя в уравнение (1.28) значения , нач и у, выраженные через соответствующие М, Мнач и Му определим
=( 0- 0)(М/Мп), нач=( 0- 0)(Му/Мп)
После подстановки получим
М=Му(1-е-t/Tм)+Мнач* е-t/Tм. (1.30)
В случае разгона от нач=0 до у= с, Му=Мс, Мнач=Мп уравнение (1.19) примет вид
М=Мс(1- е-t/Tм)+Мп е-t/Tм (1.31)
Полученные зависимости изменения скорости и вращающего момента справедливы для электроприводов постоянного тока с ДПТ независимого возбуждения и переменного тока с АД с фазным ротором и с сопротивлениями в цепи ротора.
Для указанных двигателей зависимость тока якоря (ротора) пропорциональна моменту, т.е. М=сI, где с - коэффициент двигателя, из (1.31) следует
I=Ic(1- е-t/Tм)+Iп е-t/Tм (1.32)
Зависимости со, М и /=/(£) для электроприводов с линейными характеристиками приведены на рис. 1.9.
☻ 5. Графоаналитический метод определения зависимости =f(t) в ЭП с АД к.з.р.
Аналитический расчет зависимостей =f(t) и М =f(t) для электроприводов с АД к.з.р. весьма затруднителен, так как конструкция ротора исключает возможность введения дополнительных сопротивлений в его цепь. Поэтому ограничить абсолютное скольжение в переходных процессах небольшими значениями можно только путем плавного изменения частоты тока статора. Таким образом, в случае плавного разгона с заданным ускорением необходимо использовать частотно-регулируемый электропривод со специальным узлом задания темпа разгона. На рис. 1.10 представлены переходный процесс и механическая характеристика электропривода с АД к.з.р. при прямом пуске.
,M
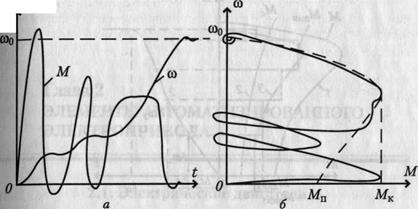
Рис. 1.10. Переходный процесс (а) и механическая характеристика (б) электропривода с АД к.з.р.
На практике для оценки длительности переходного процесса и его характера при нелинейных механических характеристиках можно использовать графоаналитический способ. Например, метод площадей, основанный на уравнении движения электропривода в конечных приращениях:
/ t=  (1.33)
(1.33)
Механические характеристики двигателя и рабочей машины изображаются во втором квадранте (рис. 1.11). По ним строится кривая динамического момента. Для режима пуска, например, Мдин = М-Мс =f().
Полученная кривая разделяется на m участков, причем чем больше m, тем точнее будет искомая зависимость. М дин на каждом участке принимается равным среднему значению. Тогда для любого к-го участка
tк=J( к/Мдин.к)
Этому значению времени, откладываемому по оси абсцисс в первом квадранте, соответствует ордината к-1+ . Проведя построение для всех участков, получаем зависимость = f(t), тогда время разгона будет равно
 (1.35)
(1.35)
М Мдин Мс
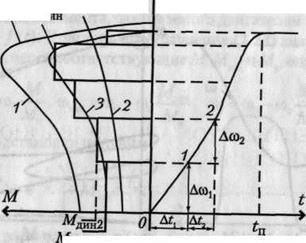
Мдин1
Графоаналитический метод определения
времени разгона электропривода:
1 — вращающий момент двигателя;
2 — момент сопротивления машины;
3 — динамический момент
Пользуясь этим же методом, можно построить зависимость =f(t) и определить время переходного процесса и для других режимов работы электропривода (торможения, переход от одной скорости к другой и т. д.). При этом Мдин = ±М - ±Мс необходимо найти с учетом знаков составляющих моментов.
6. Передаточная функция ДПТ и структурная схема. Уравнение электромеханической характеристики ДПТ с независимой обмоткой возбуждения.
Электродвигатели постоянного тока (ДПТ) имеют независимое, последовательное и смешанное возбуждение. ДПТ независимого возбуждения выпускаются двух типов: с обмоткой возбуждения, расположенной на полюсах статора машины, и с постоянными магнитами на полюсах. ДПТ последовательного и смешанного возбуждения имеют электромагнитную систему возбуждения.
В электроприводах постоянного тока, используемых в полиграфических машинах, как правило, применяют ДПТ с независимой обмоткой возбуждения (рис. 2.1). Статические и динамические свойства электродвигателя оказывают существенное влияние на качество работы привода в целом, поэтому необходимо изучение их электромеханических свойств.
ДПТ представляет собой электромеханический преобразователь и в общем случае описывается приведенными ниже уравнениями при следующем допущении: источники питания цепи якоря и возбуждения обладают бесконечной мощностью (идеализированные), сопротивление соединительных проводов равно нулю, напряжение U и U = const.
 U=iяRя+IЯ(diя/dt)+кФ
U=iяRя+IЯ(diя/dt)+кФ  ,
,
М=кФiя, (2.1)
M-Mc=J(d /dt),
Uв=iяRв+Lв(diв/dt),
Здесь Rя=Rя.о+Rд.п суммарное активное сопротивление якорнойцепи двигателя, Ом; Яяо — сопротивление обмотки якоря; Rд.п — сопротивление обмоток дополнительных полюсов; Lя=Lяо+Lд п — суммарная индуктивность якорной цепи двигателя, Гн; кФ = Е - эдс якоря, В; к= pN/2  а — конструктивный коэффициент; p,N,a — соответственночисло пар полюсов, активных проводников и параллельных ветвей обмот ки якоря; со — угловая скорость двигателя, рад/с; Ф — магнитный поток, создаваемый обмоткой возбуждения или постоянными магнитами, Вб; RB — активное сопротивление обмотки возбуждения, Ом; L в — индуктивность обмотки возбуждения, Гн; М и Мс — соответственно вращающий момент, развиваемый двигателем, и момент сопротивления на валу двигателя, Н*м; J— общий момент инерции привода, равный сумме моментов инерции двигателя J дв момента инерции передаточного механизма, Jп и момента инерции машины Jм, приведенного к валу двигателя, Н*м.
а — конструктивный коэффициент; p,N,a — соответственночисло пар полюсов, активных проводников и параллельных ветвей обмот ки якоря; со — угловая скорость двигателя, рад/с; Ф — магнитный поток, создаваемый обмоткой возбуждения или постоянными магнитами, Вб; RB — активное сопротивление обмотки возбуждения, Ом; L в — индуктивность обмотки возбуждения, Гн; М и Мс — соответственно вращающий момент, развиваемый двигателем, и момент сопротивления на валу двигателя, Н*м; J— общий момент инерции привода, равный сумме моментов инерции двигателя J дв момента инерции передаточного механизма, Jп и момента инерции машины Jм, приведенного к валу двигателя, Н*м.
☻ 8. Устройство и принцип действия БДПТ. Структурная схема. Принципиальная схема БДПТ с четырёхфазной обмоткой.
Бесконтактные двигатели постоянного тока (БДПТ) — бесконтактные машины постоянного тока с возбуждением от постоянных магнитов с одно- или многообмоточным статором, который является обмоткой якоря. Эти двигатели отвечают перечисленным выше требованиям.
Современные магнитные материалы позволяют создать БДПТ мощностью от единиц ватт до десятков киловатт, поэтому могут использоваться в главных и вспомогательных электроприводах. БДПТ используются в электроприводах, которые должны обеспечить очень высокую точность поддержания заданной скорости (до 0,01%).
|
 обмотки якоря двигателя с постоянными магнитами
обмотки якоря двигателя с постоянными магнитами

Принцип действия. В коллекторных ДПТ магнитный поток (Ф), создаваемый обмоткой возбуждения, неподвижен и имеет постоянное направление. Вектор намагничивающей силы (НС)  обмотки якоря (ОЯ) расположен под углом 90° относительно вектора магнитного потока Ф.С помощью коллектора угол 90° сохраняется и при вращении якоря (рис. 2.7).
обмотки якоря (ОЯ) расположен под углом 90° относительно вектора магнитного потока Ф.С помощью коллектора угол 90° сохраняется и при вращении якоря (рис. 2.7).
В БДПТ на вращающейся части-роторе расположены постоянные магниты, а обмотка якоря расположена на статоре (рис.2.8).
Питание обмотки статора осуществляется таким образом, чтобы между вектором НС якоря и вектором Ф сохранялся угол 90°. При вращающемся роторе это можно обеспечить за счет переключения обмоток статора с помощью специального полупроводникового коммутатора (ПК). ПК должен обеспечить два условия: обмотки должны подключаться в определенный момент времени и с заданной последовательностью. Пространственное положение ротора определяется с помощью специальных датчиков положения ротора (ДПР).
ДПР подразделяются на индуктивные; трансформаторные; магнитодиодные; оптронные; емкостные; на основе датчика Холла.
ПК и ДПР являются неотъемлемой частью БДПТ (рис. 2.9) и выполняют функции коллекторно-щеточного узла ДПТ.
@Рис. 2.8. Пространственное расположение МДС 1, обмотки статора и магнитного потока Ф2 ротора в бесконтактном двигателе в исходном положении (а) и при повороте ротора на угол а (б)@

 + U -
+ U -
 |
|
|
|
|
 | |  | |||||||
 | |||||||||
 |
ОС
 | |||
 |
Рис2.9. Структурная схема БДПТ: ПК-полупроводниковый коммутатор; ЭД-электродвигатель; ДПР-датчик положения ротора; ОС – обратная связь
ПК представляет собой полупроводниковый коммутатор, выполненный на силовых транзисторах или тиристорах, работающих в ключевом режиме (рис. 2.13). Управление силовыми ключами осуществляется специальной схемой управления по сигналам датчика положения ротора (ДПР).
На роторе расположены магниты датчика положения ротора, а на полюсных наконечниках статора (в пазах) двух смежных полюсов установлены датчики Холла (ДX1,2). Рассмотрим работу четырехфазного БДПТ с коммутатором, выполненным на транзисторах VT1- VT4 (рис. 2.13).
@Рис.2.13. Принципиальная схема бесконтактного двигателя@
Управление силовыми ключами осуществляется специальной схемой управления по сигналам датчика положения ротора (ДПР).
На роторе расположены магниты датчика положения ротора, а на полюсных наконечниках статора (в пазах) двух смежных полюсов установлены датчики Холла (ДX1,2). Рассмотрим работу четырехфазного БДПТ с коммутатором, выполненным на транзисторах VT1- VT4 (рис. 2.13).
1.  =0.
=0.
Под ДХ1 «N» (U2 = U2 н - напряжение на выходе ДХ) на выходе 4 «+», на выходе.3 «-», транзистор VT2 открыт, a VT4 — закрыт.
Под ДХ2 нет магнита на выходах, U2 = 0, VT1 и VT3 закрыты. Ток протекает по w2, ротор вращается против часовой стрелки на 90°.
2. = 90°.
Под ДХ2 «S» на выходе 3 «+», на выходе 4 «-», транзистор VT3 открыт. Под ДХ1 магнита нет, VT1,2я4 закрыты. Ток протекает по w3, и ротор поворачивается на 90°.
3. =180°.
Под ДХ1 «S» на выходе 3 «+», на выходе 4 «-», транзистор VT4 открыт, a VT1,2иЗ закрыты. Ротор поворачивается на 90°. Под ДХ2 магнита нет.
4. = 270°.
Под ДХ2 «N» на выходе 4 «+», на выходе 3 «-», транзистор VT1 открыт, a VT2, 3 и 4 закрыты. Поворот на 90°,
= 360°. Далее цикл повторяется.
| М»п/п | а,° | ДХ1 | ДХ2 | h | |||
| 0-90 | N | — | |||||
| 90-180 | — | ||||||
| 180-270 | S | _ | |||||
| 4 5 | 270-360 | — | N | ||||
| 0-90 | N | - |
Вращающий момент БДПТ имеет, как и ток, пульсирующий характер. Однако пульсации незначительны. При работе с механизмами, у вторых момент инерции много больше, чем/дв, пульсация скорости практически отсутствует. Так как БДПТ работает с собственной такто-°и частотой, то скорость ротора может быть выбрана любой. М = с1ф since при ш = const.
Поддержание заданной скорости в ЭП с БДПТ осуществляется за счет введения обратной связи по напряжению на обмотках якоря, по эдс обмоток якоря или по скорости ротора.
Жесткость собственной электромеханической характеристики БДПТ достаточно высока, изменение скорости ЭД при увеличении момента сопротивления на валу составляет несколько процентов. Введение одной из приведенных выше обратных связей приводит к увеличению жесткости электромеханической характеристики практически до абсолютно жесткой (рис. 2.15).
Не нашли, что искали? Воспользуйтесь поиском: