ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Топогеодезичної прив'язки
Основними елементами під час обробки результатів вимірювань у ході топогеодезичної прив'язки є розв’язання рішення прямої, зворотної геодезичних задач та трикутника.
Розв’язання прямої геодезичної задачі на площині (рис.4.9) зводиться до обчислення прямокутних координат точки (  ), яка визначається, за відомими координатами заданої точки (
), яка визначається, за відомими координатами заданої точки (  ), відстанню між точкою (АВ) і дирекційним кутом з заданої точки на (
), відстанню між точкою (АВ) і дирекційним кутом з заданої точки на (  ).
).
Пряма геодезична задача на обчислювачі СТМ та логарифмічній лінійці розраховується у такому порядку (бланк 1):
Бланк 1 – Бланк для розв’язання прямої геодезичної задачі
| Номер дії | Позначення та формули | Контурна точка - СП | СП - ціль 1 |
| АВ | +96 | +827 | |
|
| +7-32 | 30-87 | |
| 15-00 – R | 2-32 | 14-13 | |
| R | +2-68 | 0-87 | |

| +7365 | +7318 | |

| -47 | -1819 | |

| +7318 | ||

| |||

| +190 | -166 | |

|
- записують у бланк координати точки А (для 1;2), відстань АВ (для 3) і дирекційний кут (дія 4);
- згідно зі значенням ( обчислюють кут R (рис.4.10), а потім 15-00-R (дії 5 і 6);
- обчислюють приріст координат (для 7 і 8) за формулами:
 , (4.13)
, (4.13)
визначають знаки приросту координат згідно з рис.4.10;
- обчислюють прямокутні координати точки В (дії 9 і 10):
 , (4.14)
, (4.14)
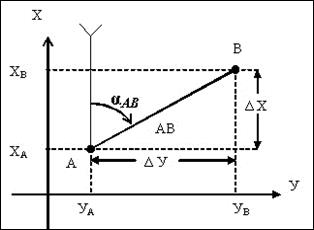
Рисунок 4.9 – Суть прямої і оберненої
геодезичних задач
Обчислення приросту координат на логарифмічній лінійці проводять в такому порядку:
- встановлюють початок (кінець) шкали движка проти відстані АВ на шкалі  ;
;
- риску візира встановлюють на значення кута 15-00-R по шкалі sin або S i T залежно від величини кута 15-00-R;
- знімають по шкалі значення  Х;
Х;
- переводять риску візира на величину R і знімають по шкалі значення Y.
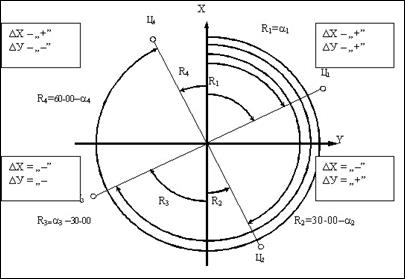
Рисунок 4.10 – Перехід від дирекційного кута a
до кута R та визначення знаків прирощень координат
Для обчислення приросту координат на обчислювачі СТМ потрібно:
- встановити початок шкал рухомого кола проти відстані АВ на шкалі чисел (шкала 3) основного кола;
- індекс движка встановити на величину 15-00-R по шкалі синусів (шкали 4 або 5) і по шкалі 3 проти індексу читають  ;
;
- індекс встановити на величину R по шкалі синусів (шкали 4 або 5) і по шкалі 3 проти індексу прочитати  .
.
Кількість цілих знаків у прирості координат визначають виходячи із такого правила:
- якщо 15-00-R ® по величині 0-95,7 до 15-00, то
 , (4.15)
, (4.15)
- якщо 15-00-R (R) по величині від 0-09,5 до 0-95,7, то
 , (4.16)
, (4.16)
- якщо 15-00-R ® по величині від 0-01 до 0-09,5 то
 , (4.17)
, (4.17)
Обчислення прямої геодезичної задачі за допомогою мікрокалькуляторів. Мікрокалькулятори вітчизняних та відомих зарубіжних виробників дозволяють обчислювати приріст координат при вирішенні ПГЗ без переходу від дирекційного кута до румба.
Розв’язання за допомогою інженерних калькуляторів:
1. Ввести значення дирекційного кута в поділках кутоміра, відокремивши великі поділки від малих комою.
2. Натиснути ´, 6 для переведення п.к. у градуси і частки градуса.
3. Натиснути М+.
4. Натиснути F COS.
5. Ввести дальність.
6. Натиснути ´.
7. Ввести Ха.
8. Натиснути +.
9. Зчитати на дисплеї значення координати Х точки.
10.Натиснути MR.
11.Натиснути F SIN.
12.Ввести дальність.
13.Натиснути ´.
14.Ввести Yа.
15.Натиснути +.
16.Зчитати на дисплеї значення координати Y точки.
Під час використання вітчизняних програмованих калькуляторів МК-61, МК-52 можливе рішення як у режимі виконання програми, так і у ручному режимі.
Рішення у режимі виконання програми прискорює процес рішення і зменшує ймовірність помилки оператора при рішенні, але вимагає попереднього введення (виклик з пам’яті для МК-52) відповідної програми і рішення контрольного прикладу; тому воно доцільне при виконанні великої кількості подібних задач (наприклад, визначення координат цілей, засічених з одного СП).
Програма для рішення ПГЗ:
| Крок | Дія | Код | Крок | Дія | Код | |
| В | ОЕ | F sin | 1С | |||
| ´ | ||||||
| ´ | П®х 2 | |||||
| х®П 3 | + | |||||
| F cos | 1Г | ' | ||||
| ´ | П®х 1 | |||||
| ' | + | |||||
| П®х 3 | с/п |
Розподіл регістрів:R1 – ХА, R2 – YА, R3 – a.
Порядок рішення:
1. Перемикач системи кутів поставити у положення “Г” (градуси).
2. Ввести ХА у регістр R1: набрати ХА, натиснути х-П 1.
3. Ввести YА у регістр R2: набрати YА, натиснути х-П 2.
4. Ввести Д.
5. Натиснути 2 рази кнопку В.
6. Ввести a.
7. Натиснути в/о, с/п.
8. По закінченні виконання програми на дисплеї зчитати значення ХВ.
9. Натиснути ', на дисплеї зчитати значення YВ.
За умови повторного рішення задачі з тими самими значеннями ХА і YА у відповідні регістри їх не вводити (тобто починати виконання з пункту 4), оскільки вони зберігаються у цих регістрах до того часу, поки не буде вимкнено живлення або оператор не змінить їх сам.
Контрольний приклад:
Ввести:1000 х-П 1 2000 х-П 2 444 В В 33 в/о с/п.
Після закінчення виконання програми на дисплеї: 577,730906.
Натиснути ', на дисплеї: 1862,7964544.
Рішення у ручному режимі доцільне, коли машинна пам’ять використовується для зберігання програм рішення більш громіздких задач; задача буде виконуватись одноразово, і оператор передбачає проведення контролю обчислень, хоча б грубо.
Порядок рішення:
1. Перемикач системи кутів поставити у положення “Г” (градуси).
2. Ввести Д.
3. Натиснути 2 рази кнопку В.
4. Ввести a.
5. Натиснути В 6 * х-П 3 F sin * ' П-х 3 F cos *.
6. Ввести XА.
7. Натиснути +, на дисплеї зчитати значення XВ.
8. Натиснути '.
9. Ввести YА.
10. Натиснути +, на дисплеї зчитати значення YВ.
Останнім часом надійшли до продажу інженерні калькулятори зарубіжного виробництва, що мають вбудовані функції перерахування полярних координат у прямокутні і навпаки, що дозволяє безпосередньо обчислювати прирощення координат. Використання цих функцій здійснюється за допомогою клавіш a i b у поєднанні із функціональною клавішею 2ndF. Вирішення прямої геодезичної задачі за допомогою таких калькуляторів здійснюється у наступній послідовності:
1. Увімкнути калькулятор.
2. Упевнитись, що калькулятор налаштований для роботи у градусній системі (не у радіанах і не у градах), – у верхній частині індикатора виведено DEG (а не RAD і не GRAD).
3. Ввести значення дирекційного кута в поділках кутоміра, відокремивши великі поділки від малих комою.
4. Натиснути ´, 6 для переведення п.к. у градуси і частки градуса; натиснути b.
5. Ввести значення дальності, натиснути а.
6. Натиснути 2ndF, b; (на дисплей – значення Dх); натиснути х®М.
7. Натиснути b +, ввести значення Yсп, натиснути =; зчитати на дисплеї значення Yц.
8. Натиснути MR +, ввести значення Xсп, натиснути =; зчитати за дисплеї значення Xц.
Розв’язання зворотної геодезичної задачі, рис.61, на площині зводиться до обчислення дирекційного кута з даної точки на іншу і відстані між ними по прямокутних координатах цих точок.
Вирішення зворотної геодезичної задачі на логарифмічній лінійці і обчислювачі СТМ (бланк 2) проводиться в такому порядку:
1. Визначають значення приросту координат за формулою
 (дії 5 і 6), (4.18)
(дії 5 і 6), (4.18)
2. Обчислюють величину кута  (для 2) за формулою
(для 2) за формулою
 , (4.19)
, (4.19)
де в – менше із приросту координат або ;
а – більше із приросту координат або ;
Бланк 2 – Вирішення зворотної геодезичної задачі
на обчислювачі СТМ або логарифмічній лінійці
| Номер дії | Позначення | СП-ОР1 | СП-ОР2 |

| |||

| |||
|
| +1692 | ||

| |||

| |||
|
| -405 | -217 | |
|
| 5-91 | 1-22 | |

| 50-91 | 58-78 | |
| АВ |
Обчислення проводяться у такій послідовності:
| На обчислювачі СТМ | На логарифмічній лінійці |
| - індекс движка встановлюють на величину в за шкалою чисел (шкала 3) основного круга;
- обертанням рухомого круга встановлюють під індекс движка значення величини за шкалою чисел (шкала 6), індекс движка суміщають з початком рухомого круга і за шкалою тангенсів (шкали 1 і 2) знімають значення кута .
| - початок шкали N движка встановлюють проти, а на шкалі чисел корпусу лінійки;
- встановлюють візирну лінійку напроти на тій самій шкалі корпусу лінійки;
- знімають проти візирної лінійки значення кута за шкалою tg або S і Т.
Якщо візирна лінійка не потрапляє на шкалу tg або S і Т, то з числом суміщають не початок, а кінець шкал движка.
|
Примітка. Якщо відхилення більшого приросту до меншого приросту менше 10, відлік знімають зі шкали 1 обчислювача (шкали тангенсів логарифмічної лінійки); якщо ж більше 10, але менше 100, зі шкали 2 обчислювача (шкали 8 і Т логарифмічної лінійки) і зменшують у 10 разів.
3. Обчислюють дирекційний кут за величиною , користуючись табл. 8, і записують в бланк (дія 8).
Таблиця 8 – Визначення дирекційного кута цілі через кут
|
| 30-
| 
| 30+
| 60-
|
| + | - |
| - | + |
| + | + |
| - | - |
| 15-
| 15-
| 
| 45-
| 45+
|
4. Обчислюють відстань АВ (дія 9) за формулою
 , (4.20)
, (4.20)
у такій послідовності:
| На обчислювачі | На логарифмічній лінійці |
| - встановлюють індекс движка за шкалою 3 на величину меншого приросту;
- обертанням рухомого круга підводять під індекс движка значення кута за шкалою синусів (шкали 4;5);
| - встановлюють риску візира проти меншого приросту ;
- переміщуючи движок, підводять значення кута за шкалою синусів або S і Т;
|
| - індекс движка суміщають з початком рухомого круга і за шкалою 3 проти індексу движка знімають значення АВ. | - проти початку (кінця) шкали движка знімають значення із шкали відстані, яку шукають.
|
За умови більш точних розрахунків на логарифмічній лінійці відстань АВ визначають через приріст а більшої різниці координати «а».
 , (4.21)
, (4.21)
Для визначення величини  край шкали движка встановлюють проти величини «в» на шкалі корпусу лінійки, а потім встановлюють візирну лінію напроти значення ρ / 2, на відповідній шкалі (тангенсів або „S i T”) і на шкалі знімають величину . При цьому, якщо кут ρ / 2 брався за шкалою tg, то
край шкали движка встановлюють проти величини «в» на шкалі корпусу лінійки, а потім встановлюють візирну лінію напроти значення ρ / 2, на відповідній шкалі (тангенсів або „S i T”) і на шкалі знімають величину . При цьому, якщо кут ρ / 2 брався за шкалою tg, то  , якщо за шкалою синусів, то
, якщо за шкалою синусів, то  , і якщо за точками шкали S і T, то
, і якщо за точками шкали S і T, то  .
.
Не нашли, что искали? Воспользуйтесь поиском: