ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
МАРШРУТИЗАЦИЯ ПЕРЕВОЗОК
Маршрутизация перевозок - это составление маршрутов движения подвижного состава или его порядок следования между пунктами производства и потребления. Маршрутизацию перевозок выполняют для однородных грузов, требующих для перевозки однотипный подвижной состав. При маршрутизации перевозок учитывается множество ограничений, вызываемых конкретными условиями работы транспорта: объемы перевозок поставщиков и потребителей, характер грузов, время их доставки, структура парка подвижного состава и его наличие, режим работы автотранспортных предприятий и погрузочно-разгрузочных пунктов, режим работы водителей, пропускная возможность погрузочно-разгрузочных пунктов и дорожной сети, значение целевой функции и др.
Методы маршрутизации перевозок делятся на маршрутизацию перевозок помашинных отправок и маршрутизацию перевозок мелких партий грузов.
В зависимости от использования математического аппарата они делятся на методы, основанные на моделях математического программирования, и на методы, основанные на алгоритмах задач теории расписаний.
Методы первого класса делятся на две группы. К первой группе относятся задачи, в которых при известных ездках с грузом определяются потоки движения автомобильного подвижного состава без груза.
Недостатки этого метода: не обеспечивается учет всех ограничений и параметров, существующих в реальной системе (время в наряде, закрепление автомобилей за клиентурой и т. д.);
возникает необходимость корректирования плана вручную (составление графиков движения, графика работы погрузочно-разгрузочного пункта), что иногда приводит к отклонениям от полученного варианта.
Методы второй группы рассматривают маршруты движения как технологические способы использования ресурсов с определенными «ценами», и задаются столбцы матрицы условий. Переменными являются интенсивности грузопотоков по маршрутам.
Преимущества (по сравнению с первым методом): возможность учета многих ограничений, выдвигаемых практикой; исключение ручных операций при составлении оперативного плана.
Недостатки:
большая размерность задач, определяющая трудность решения;
не учитывается наличие очередей в пунктах выполнения погрузочно- разгрузочных работ (ПРР);
алгоритмы имеют недостаточное быстродействие для оперативного управления перевозочным процессом в реальном режиме времени.
Методы второго класса построены на использовании аппарата теории расписаний. Этапы транспортного процесса (погрузка, транспортирование, разгрузка, подача подвижного состава) представляются в виде «работ». Подвижной состав и посты ПРР выступают как «приборы», предназначенные для выполнения «работ». В результате решения задачи определяется расписание выполнения «работ» (распределение ресурсов между работами и очередность выполнения работ).
Недостаток:
отсутствуют алгоритмы точного решения задач теории расписаний из-за большой размерности.
В настоящее время известны следующие приближенные методы решения задач теории расписаний:
методы случайного поиска;
методы ситуационного управления;
методы, основанные на эвристических процедурах сокращения размерности задачи.
Методы случайного поиска построены на использовании процедуры Монте-Карло. Из полученного множества решений выбирается наилучшее, согласно заданному критерию оптимальности. Полученные этим методом решения обычно находятся на уровне решений, принимаемых опытным диспетчером. По этой причине они не нашли широкого применения.
Модели методов теории ситуационного управления определенным образом формализуют реальные системы, которые работают в диалоговом режиме с ЭВМ и могут «обучаться» на опыте экспертов (диспетчеров). Так как модель перенимает опыт человека, то после «обучения» решает задачи на уровне принимавших участие экспертов. Требуется большое время на «обучение» ЭВМ; равно как и имеет место сложность алгоритмической и программной реализации.
Методы, основанные на эвристических процедурах сокращения размерности задачи, заключаются в следующем. Процесс составления маршрутов движения делится на несколько шагов. На каждом шаге выбирается «работа» для загрузки незанятого «прибора». Выбор осуществляется из некоторого количества «работ», которые могут быть выполнены рассматриваемым «прибором». Наличие свободы выбора «работ» обуславливает существование определенного множества планов, которые отличаются друг от друга величиной некоторых показателей (простои «приборов», общая продолжительность выполнения заданных «работ» и т. д.). Функции предпочтения представляют собой формальную оценку принимаемого решения на конкретном шаге формирования оперативного плана.
Использование функций предпочтения позволяет сформировать план, близкий к оптимальному, не «просматривая» других возможных решений. В качестве функции предпочтения могут выступать длительность выполнения очередного этапа обслуживания и др.
Для достижения оптимальности полученных планов используют комбинацию функций предпочтения как решения комбинаторных задач как в виде последовательности функций предпочтения, так и в виде обобщенного показателя.
Наибольшее применение для формирования маршрутов перевозок находит метод «совмещенной матрицы», когда при известных ездках с грузом определяется движение подвижного состава без груза. Этот метод предполагает, что план поставок выполняется совокупностью любых маятниковых и кольцевых маршрутов независимо от их протяженности, числа звеньев и без учета подачи и возврата автомобилей. Необходимое условие - число автомобилей, прибывающих в пункт погрузки, должно равняться числу автомобилей, выходящих из этого пункта.
Задача формулируется следующим образом: минимизировать холостые пробеги
| (8.41) |

где: yij - число ездок без груза из j пункта выгрузки в i пункт погрузки. Рассмотрим применение этого метода на примере.
Задача 8.6. Строительные организации В1, B2, В3, В4, В5, В6 получают строительные материалы с пяти карьеров (рис. 8.8).

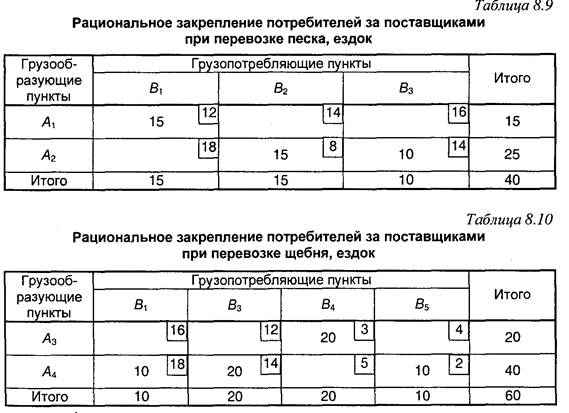
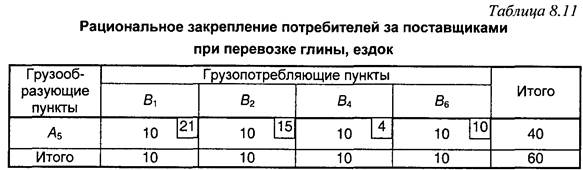
| Рациональное закрепление потребителей грузов за поставщиками приведено в табл. 8.9-8.11. Кратчайшее расстояние между пунктами указано в табл. 8.12. Все перечисленные строительные материалы можно перевозить на одном и том же типе подвижного состава. |
Необходимо так организовать перевозочный процесс, чтобы коэффициент использования пробега подвижного состава имел максимально возможную величину.
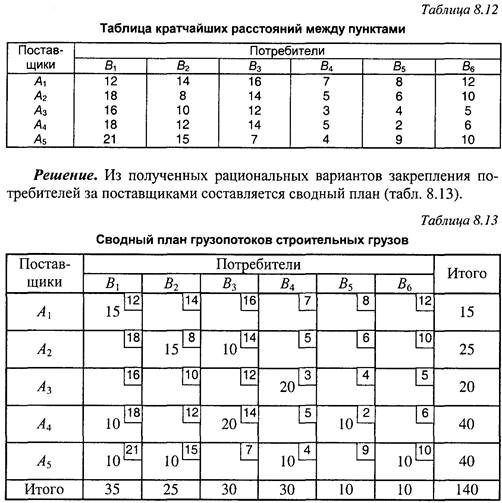
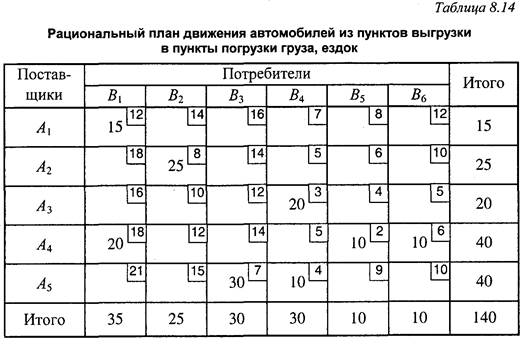
Одним из математических методов определяется рациональный план движения автомобилей из пунктов выгрузки грузов в пункты погрузки(табл. 8.14).
Для составления маршрутов можно пользоваться методом «совмещенной матрицы». Сущность этого метода состоит в том, что в одну матрицу записываются данные о ездках с грузом и холостых ездках (табл. 8.15).

Чтобы отличать груженые ездки от холостых, желательно одни из них выделить (подчеркнуть, обвести кружком, записать другим цветом и т. д.)- В нашем примере ездки с грузом подчеркнуты. Если в клетке будут две записи, то это указывает на наличие маятникового маршрута, величина грузопотока которого определяется меньшей цифрой.
После того как будут выявлены маятниковые маршруты, в клетках таблицы останется только по одной цифре (табл. 8.16).

Для каждой клетки табл. 8.16, загруженной ездкой с грузом, строится контур (маршрут движения), вершины которого попеременно находятся в клетках, загруженных гружеными и холостыми ездками.
Величина грузопотока каждого маршрута определяется наименьшей величиной груженых ездок. Определение кольцевых маршрутов продолжается до тех пор, пока не останется ни одной загруженной клетки.
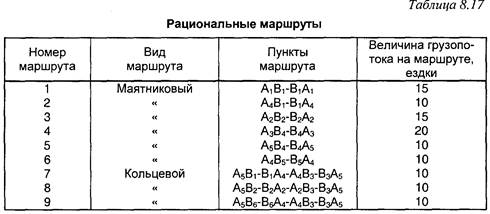
В табл. 8.17 приведены рациональные маршруты движения подвижного состава, определенные из условий нашей задачи.
Для составления схем маршрута движения подвижного состава необходимо определить начальный и конечный пункт каждого маршрута.
Рациональный выбор начального и конечного пунктов маршрута позволяет сократить пробег подвижного состава без груза за счет того, что в последнем обороте подвижного состава по маршруту из суммы общего пробега выпадает участок от последнего пункта выгрузки до первого пункта погрузки. В маятниковых маршрутах может быть только один вариант начального и конечного пунктов маршрута. При выполнении кольцевых маршрутов начало маршрута может быть из любого пункта погрузки, т. е. число вариантов равняется числу погрузочных пунктов в маршруте.
За критерий оптимальности при выборе начального пункта маршрута принимается минимум суммы нулевого пробега с непроизводительным (холостым) пробегом подвижного состава, т. е.минимизировать

где: 1"х - пробег подвижного состава без груза от последнего пункта выгрузки до первого пункта погрузки, км;
loi - нулевой пробег при i начальном пункте маршрута, км.
Σlxi - сумма холостых пробегов на участках маршрута, км
Не нашли, что искали? Воспользуйтесь поиском: