ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Выбор независимых переменных 11 страница. Рис. 5.7 Структурная схема системы
 Рис. 5.7 Структурная схема системы
Рис. 5.7 Структурная схема системы

|

|

|
|
|

|
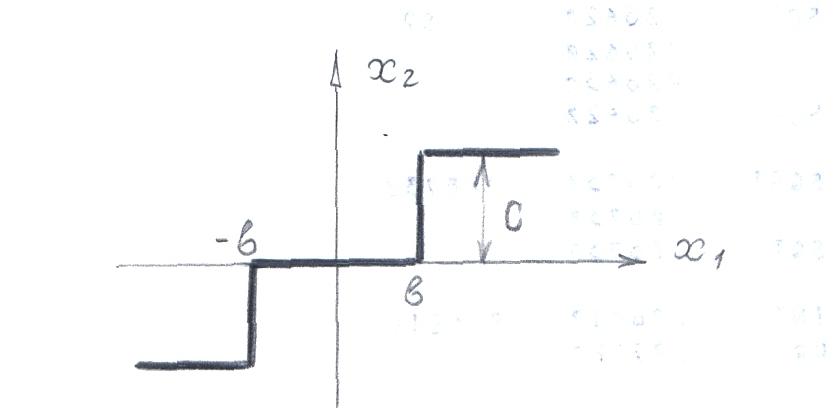
Рис. 5.8 Статическая характеристика нелинейного звена
Рис. 5.9 Переходные процессы в САУ: с исходными параметрами (_______),
с оптимальными параметрами (n=4); метод сопряженных градиентов ();
метод случайного поиска (Даниленко – Каган) ();
метод градиента ().
Таблица 5.19
Результаты оптимизации
| Общее количество шагов | Число удачных шагов | Число неудачных шагов | Значение 
| Значение независимых переменных | Метод оптимизации | |||

| 
| 
| 
| |||||
| 0,2688 | 2,48 | 0,0457 | 2,66 | 0,0979 | Растригин-Тарасенко [34] | |||
| 0,2656 | 1,56 | 0,025 | 2,38 | 0,075 | Градиентный [41] | |||
| 0,2677 | 2,56 | 0,0378 | 2,60 | 0,118 | Даниленко Каган [33] | |||
| 0,2538 | 2,33 | 0,0357 | 2,58 | 0,112 | Сопряженных градиентов [4] | |||
| 0,2395 | 3,37 | 0,025 | 3,39 | 0,0917 | Севриткин [39] | |||
| До оптимиза ции | 0,3261 | 2,33 | 0,074 | 2,58 | 0,126 |
5.3 Результаты решения тестовых задач оптимизации при использовании различных стратегий выбора поисковых методов
Разработка и применение эффективных критериев распознавания поисковых ситуаций повышает качество функционирования пакета программ оптимизации, но при этом усложняется алгоритм распознавания, увеличиваются затраты машинного времени и т.д. Таким образом, возникает вопрос о создании надежных и экономичных критериев распознавания поисковых ситуаций.
Для сравнительной оценки различных подходов к выбору методов оптимизации, определения затрат на распознавание, идентификацию поисковой ситуации и формирование решающих правил в работе проведен эксперимент на тестовой функции вида

где n - размерность пространства независимых переменных X. Решается
задача отыскания  :
:  = 0, при
= 0, при  =i, i=1,n.
=i, i=1,n.
Результаты решения тестовой задачи при п=8, начальных значениях независимых переменных  ,
,  , области поиска 0,1 <хi<100, i=1,8 при различных стратегиях выбора методов оптимизации представлены в таблицах 5.20-5.22, где используются следующие обозначения:
, области поиска 0,1 <хi<100, i=1,8 при различных стратегиях выбора методов оптимизации представлены в таблицах 5.20-5.22, где используются следующие обозначения:
JCN - число вычислений  ;
;
JC2, JC4 - соответственно число удачных и неудачных шагов поиска
экстремума;
 - вычисленное за JCN шагов оптимальное значение функции;
- вычисленное за JCN шагов оптимальное значение функции;
 - вычисленное за JCN оптимальное значение независимых
- вычисленное за JCN оптимальное значение независимых
переменных.
В таблице 5.20 представлены результаты решения тестовой задачи с использованием случайного подхода, реализующего идею выбора алгоритма поиска случайным образом. После работы различных алгоритмов поиска счет был прекращен по причине исчерпания ресурса шагов поиска.
В таблице 5.21 представлены результаты реализации жестко фиксированной последовательности выбора поисковых процедур. Счет был прекращен по
причине выполнения условия 
В таблице 5.22 представлены результаты реализации адаптивного подхода, в котором на основе идентификации поисковой ситуации и формирования решающих правил выбирается рациональный алгоритм поиска. Так же, как и в предыдущем случае, счет был прекращен по причине
 <
<  Нижеприведенные результаты расчетов в некотором смысле демонстрируют. достоинство адаптивного подхода [64-66] к выбору алгоритмов оптимизации.
Нижеприведенные результаты расчетов в некотором смысле демонстрируют. достоинство адаптивного подхода [64-66] к выбору алгоритмов оптимизации.
Таблица 5.20
Результаты решения тестовой задачи с использованием случайного подхода
| Метод оптимизации | JСN | JС2 | JC4 | 
| Значение независимых переменных | |||||||

| 
| 
| 
| 
| 
| 
| 
| |||||
| Исходная точка | ||||||||||||
| Растригин – Рипа | 9119,5 | 0,1 | 0,1 | 0,1 | 0,1 | 4,1 | 0,1 | 4,1 | ||||
| Давидон – Флетчер – Пауэлл | - | - | 145,01 | 0,1 | 0,1 | 0,1 | 0,1 | 6,95 | 4,1 | 17,5 | 7,8 | |
| Трахтенберг | 86,816 | 2,84 | 0,1 | 0,1 | 0,1 | 5,99 | 4,1 | 17,5 | 7,8 | |||
| Наискорейший спуск | 80,426 | 2,77 | 0,121 | 0,131 | 0,143 | 5,92 | 0,164 | 10,8 | 9,19 | |||
| Трахтенберг | 71,526 | 2,24 | 0,1 | 0,165 | 0,1 | 5,43 | 0,769 | 10,8 | 9,79 | |||
| Растригин - Тарасенко | 62,724 | 2,14 | 0,225 | 0,895 | 0,174 | 5,79 | 1,19 | 10,4 | 9,95 |
Остановка по причине исчерпания ресурса шагов оптимизации.
Таблица 5.21
Результаты решения тестовой задачи с использованием детерминированного подхода
| Метод оптимизации | JCN | JC2 | JC4 | 
| Значения независимых переменных | |||||||

| 
| 
| 
| 
| 
| 
| 
| |||||
| Исходная точка | ||||||||||||
| Метод наискорейшего спуска | 55,935 | 0,10 | 0,10 | 0,10 | 0,10 | 3,22 | 3,22 | 3,22 | 6,3 | |||
| Метод сопряженных градиентов | - | - | 
| 0,997 | 2,03 | 3,0 | 4,03 | 4,98 | 5,97 | 6,98 | 7,9 |
Остановка по причине выполнения условия: < ;  =0,10.
=0,10.
Таблица 5.22
Результаты решения тестовой задачи с использованием адаптивного подхода
| Метод оптимизации | JCN | JC2 | JC4 |
| Значения независимых переменных | |||||||

| 
| 
| 
| 
| 
| 
| 
| |||||
| Исходная точка | ||||||||||||
| Метод градиента | 
| 0,995 | 1,99 | 2,99 | 3,99 | 5,0 | 6,0 | 7,0 | 8,0 |
Остановка по причине выполнения условия: < ; =0,10.
5.4. Методика использования алгоритмов НЛП в задачах разработки энергооптимальных программ движения поездов на тепловозной тяге
Одним из путей экономии дизельного топлива является совершенствование режимов ведения поездов на тепловозной тяге, что определило цели и этапы работы по автоматизации разработки оптимальных программ ведения поездов выполненной кафедрой ''Управление и информатика в технических системах'' Московского института инженеров железнодорожного транспорта совместно с Прибалтийской железной дорогой [93, 94]. Кроме того энергооптимальное управление тесно связано с вопросом определения научнообоснованных норм расхода топлива. Существующие методы разработки рациональных режимов ведения поездов, связанные с опытными поездками и являющиеся обобщением опыта классных машинистов, нельзя признать совершенными, т. к. нет уверенности, что разработанные режимы являются оптимальными. В свете вышеизложенного в данном разделе описано решение задачи создания расчетной методики формирования оптимальных программ ведения поездов на тепловозной тяге с применением ЭВМ, позволяющей автоматизировать процесс расчета.
Задача оптимального управления движением поезда формулируется следующимобразом: для поезда, ведомого тепловозом определенного типа с заданным составом, необходимо найти такое управление (функцию позиций контроллера машиниста по пути), которое обеспечивает движение поезда на заданном участке при соблюдении задаваемых ограничений на скорость движения и расписание прохождения отдельных станций с минимальным расходом топлива. Характерной особенностью данной работы по сравнению с подобными, например [95] является то, что синтез оптимальных программ ведения поезда осуществляется на математической модели, учитывающей переходные процессы по силе тяги тепловоза и по расходу топлива. Такой учет позволяет создать адекватную реальному объекту математическую модель, используемую в дальнейшем для синтеза оптимального управления.
Использование математического моделирования потребовало разработки математической модели объекта управления, разработки алгоритма и программы тяговых расчетов на ЭВМ, проверки адекватности разработанной модели.
Осуществлена проверка адекватности разработанной модели путем сравнения экспериментальных  и рассчитанных на ЭВМ
и рассчитанных на ЭВМ  кривых скорости, а также экспериментальных и расчетных времен прохождения станций при одном и том же управлении
кривых скорости, а также экспериментальных и расчетных времен прохождения станций при одном и том же управлении  .
.
В результате проверки адекватности модели, проведенной для одного из участков Прибалтийской железной дороги протяженностью 30 км, установлено, что кривые по скорости практически совпадают, а разность экспериментальных и расчетных времен прохождения станций не превышает ±0,5 мин, что позволяет сделать вывод об адекватности разработанной математической модели пассажирского поезда на тепловозной тяге в части траектории движения. Что касается точности сравнения расчетного значения расхода топлива по сравнению с экспериментальным, то получение таковой в условиях депо не представляется возможным.
Для решения сформулированной задачи оптимального управления может быть применен один из современных методов расчета оптимального управления. Однако использование аппарата вариационного исчисления затруднительно из-за большого числа ограничений. Применение дискретного варианта динамического программирования требует высокого быстродействия и большого объема памяти ЦВМ, а использование принципа максимума связано с проблемой выбора начальных значений  -функций. Поэтому в данной работе было решено использовать аппарат нелинейного программирования, применение которого не встречает трудностей при реализации поставленной задачи на ЦВМ.
-функций. Поэтому в данной работе было решено использовать аппарат нелинейного программирования, применение которого не встречает трудностей при реализации поставленной задачи на ЦВМ.
Из множества методов НЛП [4] в данной работе используется метод случайного поиска, заключающийся в случайном формировании управления и пошаговом запоминании таких его значений, при которых обеспечивается минимум критерия оптимальности при отсутствии нарушений ограничений. При нарушении отмеченных ограничений производится коррекция управления, которая заключается в следующем:
1) при отставании от графика прибытия на станцию производится формирование нового вектора управления, заключающееся в последовательном повышении позиций контроллера до тех пор, пока не будет достигнута заданная точность соблюдения графика;
2) при опережении графика с вектором управления производится операция обратная вышеописанной в п. 1;
3) при нарушении ограничений по скорости производится снижение позиций контроллера до тех пор пока движение по перегону будет производиться без этих нарушений.
Разработанная математическая модель (метод случайного поиска с коррекцией управления, неполный перечень способов которой приведен выше), были положены в основу программы, разработка которой велась с использованием языка Фортран-IV. В качестве исходных данных в программе задаются: тяговые и теплотехнические характеристики тепловоза и параметры состава, профиль участка, ограничения по скорости, расписание движения по станциям и др. Результатами расчетов по разработанной программе позиции контроллера машиниста, скорость и время расхода топлива. По разработанной программе были проведены многочисленные расчеты оптимального управления  (S) для ряда пассажирских поездов различных участков Прибалтийской ж.д.
(S) для ряда пассажирских поездов различных участков Прибалтийской ж.д.
Проведение расчетов исключительно для пассажирских поездов связано, во-первых, с более строгим соблюдением графика в пассажирском движении, во-вторых, с определенностью веса пассажирского состава, в-третьих, с меньшей длиной пассажирского поезда по сравнению с грузовым, что существенно в смысле адекватности разработанной математической модели. Относительно численных значений исходных данных следует сказать, что характеристики тепловоза определены по данным депо Засулаукс Прибалтийской ж.д., параметры состава пассажирского поезда и времена прохождения станций определены по расписанию движения пассажирских поездов. Профиль пути по всем используемым участкам получен в Управлении Прибалтийской ж.д.
Каждый расчет оптимального управления заканчивался по заданному числу итераций. Увеличение этого числа вело к уменьшению расхода топлива, однако при этом увеличивались затраты машинного времени. Отладочные расчеты показали, что рекомендуемое число итераций составляет от 100 до 500.
Получающееся в результате расчетов оптимальное управление, содержит частые переключения с одной позиции на другую и при ручном управлении требует повышенного внимания от машиниста. Поэтому для упрощенного управления (в смысле меньшего числа переключений контроллера машиниста) производится сглаживание полученного управления. «Сглаженное» управление имеет незначительное превышение расхода топлива, но существенно меньшее число переключений. Расчетная экономия дизельного топлива для указанного участка составила 7%.
В заключение можно отметить, что задача оптимального управления движением поезда на тепловозной тяге сведена к задаче НЛП для решения которой использован метод случайного поиска с элементами коррекции при формировании управления из условия обеспечения заданных ограничений на скорость движения и время движения расписанию. Результаты многочисленных расчетов, проведенных с использованием разработанной авторами [93, 94] программы, показали практическую возможность и целесообразность предложенной методики для синтеза оптимального управления движением поездов.
6. Стандартное программное обеспечение решения задач нелинейного программирования
Разнообразие и сложность реальных задач принятия оптимальных решений (в частности, разработка энергооптимальных программ движения поездов) требуют применения эффективных и надежных средств поиска оптимума. Интерес к разработке поисковых алгоритмов решения оптимизационных задач не ослабевает и по сей день [97-105]. В Интернете имеется огромное количество литературы по тематике ''Численные методы оптимизации'' или ''Методы нелинейного программирования''. Некоторые книги помимо описания алгоритмов содержат программы оптимизации, написанные на том или ином языке, например, Pascal, Fortran, Basic. Наличие таких программ, в какой-то мере, может помочь исследователю в решении задач оптимизации на компьютере. При этом необходимо располагать:
1) адекватной математической моделью оптимизируемого процесса, реализованной на компьютере;
2) программой расчета критерия оптимальности;
3) программой конкретного метода оптимизации(градиентные методы, методы случайного поиска и др.).
При построении математической модели оптимизируемого процесса используются:
1) теоретические модели, сформированные на описании процессов на основе законов механики, физики, электротехники и др.;
2) экспериментально — статистические модели, когда теоретическую модель построить невозможно из-за сложности исследуемого динамического процесса, например, на химических производствах, в биологических системах и др.
У инженера-разработчика перед решением конкретной задачи оптимизации возникают вопросы о выборе алгоритма, назначении для него рациональных настроечных параметров, приемлемом времени решения задачи и др. При этом, не являясь специалистом в области оптимизации, а также нежелание тратить время на программирование тех или иных алгоритмов, пользователь, тем не менее, стремится получить оптимальное решение в кратчайшие сроки.
В данной главе рассматриваются вопросы использования поисковых методов оптимизации, имеющихся в различных инструментальных системах, разработанных как крупными корпорациями, так и ведущими российскими ВУЗами. К таким программным продуктам, например, относятся LabVIEW[106-110], MATLAB[111-116], МВТУ[117,118]. Автор данного пособия в течение многих лет руководит курсовым проектированием в рамках дисциплины ''Автоматизация проектирования систем и средств управления'', выполняемым студентами специальности 220201 ''Управление и информатика в технических системах''. Целью курсового проекта является параметрический синтез корректирующего устройства, обеспечивающего устойчивую работу следящей системы автоматического управления (САУ) и выполнение требований к статике и динамике системы [119].
6.1. Объект исследования
Структурная схема исследуемой в курсовом проекте следящей САУ изображена на рис. 6.1.

|

|

|
| Wку(р) |
| Кизм |
| y(t) |
| g(t) |
| e(t) |
Рис. 6.1 Структурная схема следящей САУ
Рассматриваемая САУ состоит из следующих звеньев:
1) Сельсинная пара (СД-СП), работающая в трансформаторном режиме и имеющая статический коэффициент усиления Кизм;
2) Усилитель с передаточной функцией

где Кус -коэффициент усиления;
Тус -постоянная времени. 3) Синтезируемое корректирующее устройство с передаточной функцией

4)Двигатель с передаточной функцией

где Кдв - коэффициент усиления;
Тдв - постоянная времени.
5)Редуктор с передаточной функцией

где  - передаточное число редуктора.
- передаточное число редуктора.
На вход системы поступает единичное ступенчатое воздействие g(t)=1(t). На выходе САУ получаем переходную функцию y(t)=h(t). Следящая система отрабатывает рассогласование между входом и выходом  (t).
(t).
Под синтезом корректирующего устройства в данном курсовом проекте понимается определение параметров корректирующего устройства заданной структуры из условия выполнения требований к динамике САУ по времени регулирования переходного процесса  и перерегулированию
и перерегулированию  . Кроме того, САУ должна обеспечить заданную кинетическую ошибку
. Кроме того, САУ должна обеспечить заданную кинетическую ошибку  при входном воздействие типа
при входном воздействие типа  .
.
Сформулированные выше задача параметрического синтеза относится к задаче нелинейного программирования(НЛП), для решения которой используются поисковые алгоритмы оптимизации, реализованные в пакетах прикладных программ LabVIEW, MATLAB, МВТУ. Подробное изложение методики использования вышеупомянутых программных продуктов дано в [120-123].
В этих методических указаниях описываются действия студента при решении конкретных задач (устойчивость, качество переходного процесса, оптимизация параметров САУ) при использовании программных продуктов LabVIEW, MATLAB, МВТУ. Даются рекомендации по разработке индивидуальных программ для решения подобных задач на языке Delphi.
Структура корректирующего устройства, используемая в курсовом проекте имеет вид[119].

Изменение параметров  корректирующего устройства (с последующим анализом устойчивости скорректированной системы и построением переходного процесса в ней в случае устойчивости) производится с использованием поисковых методов оптимизации. Подробное описание некоторых из них дается в главе 2.
корректирующего устройства (с последующим анализом устойчивости скорректированной системы и построением переходного процесса в ней в случае устойчивости) производится с использованием поисковых методов оптимизации. Подробное описание некоторых из них дается в главе 2.
Укрупненная блок-схема алгоритма синтеза корректирующего устройства САУ с применением методов НЛП приведена на рис. 2 [119].
Следует отметить, что использование в качестве критерия оптимальности, характеризующего динамику САУ, квадратичных интегральных оценок вида
Не нашли, что искали? Воспользуйтесь поиском: