ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Метод Гаусса решения системы n линейных уравнений с п переменными. Понятие о методе Жордана – Гаусса.
Метод Гаусса – метод послед-го исключ.переменных. Сначала(на 1-м шаге прямого хода Гаусса) из всех ур-ний,кроме 1-го исключается переменная х1. Потом (на 2 шаге) из всех ур-й,кроме первых 2-х исключается переменная х2 и т.д.,пока последнее ур-е не приобретёт вид: С * Хn=bm, если ч-ло С=0, а bm не=0,то с-ма не совместная,т.е.нет решений. Если С=0 и bm=0,т.е. 0*Хn=0,то с-ма неопределённая,т.е. имеет бескон.мн.реш.,то с-ма совместно-определённая. В этом сл-е Хn=bn/C
Полученное зн-е Хn подстав.в предпосл.ур-е,находим Хn-1 и тд.,пока не получ.все неизв-е.
Обратный ход Гаусса. Из м-цы ступенч.вида записывается ур-е. Далее,начиная с конца находим все переменные. Допустим Х4. Подставляем в верхнее и нах-м Х3 и т.д.
Метод Гаусса — Жордана исп-ся для реш.квадр.систем лин.ур-ний, нахождения обрат.м-цы, отыскания ранга м-цы. Метод явл-ся модификацией метода Гаусса. Назван в честь Гаусса и Жордана.
Теорема Кронекера-Капелли. Сист.лин.ур-й совмест.тог.и т.тог,ког.ранг м-цы сист.А равен рангу расшир.м-цы (А|B) этой с-мы.
r<m – ур-я с-мы(строки расш.м-цы)зависимые;
r=m –ур-я с-мы (стр.расш.м.)независимые;
r(A)не=r(A|B) - с-ма несовм-ная;
r(A)=r(A|B)=r – с-ма совм-ная;
r<n – с-ма неопред.(бескон.мн.реш.);
r=n – с-ма опред-ная (единств.реш.)
Если у сист.ур-ния есть реш-е,то такая система совместна,если решения ур-я нет, то не совместная.
Если система лин.ур-й имеет единств.решение Х=(х1,х2,…хn),то такая сист.наз. определённой. Если СЛУ имеет больше, чем одно реш-е,то такая сист .не определённая.
8. Системы m линейных уравнений с n переменными.Теорема Кронекера-Капелли.Условие определённости и неопределённости любой системы линейных уравнений.
Системы m линейных уравнений с n переменными имеет вид:
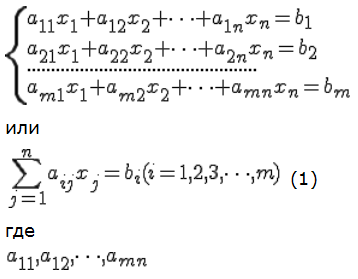
Произвольные числа, называемые соответственно коэффициентами при переменных и
-свободными членами уравнений.
Решением системы (1) называется такая совокупность n чисел
при подстановке которых каждое уравнение системы обращается в верное равенство
Теорема Кронекера-Капелли. Сист.лин.ур-й совмест.тог.и т.тог,ког.ранг м-цы сист.А равен рангу расшир.м-цы (А|B) этой с-мы.
r<m – ур-я с-мы(строки расш.м-цы)зависимые;
r=m –ур-я с-мы (стр.расш.м.)независимые;
r(A)не=r(A|B) - с-ма несовм-ная;
r(A)=r(A|B)=r – с-ма совм-ная;
r<n – с-ма неопред.(бескон.мн.реш.);
r=n – с-ма опред-ная (единств.реш.)
Если у сист.ур-ния есть реш-е,то такая система совместна,если решения ур-я нет, то не совместная.
Если система лин.ур-й имеет единств.решение Х=(х1,х2,…хn),то такая сист.наз. определённой. Если СЛУ имеет больше, чем одно реш-е,то такая сист .не определённая.
9. Базисные(основные) и свободные(неосновные) переменные системы m линейных уранений с n переменными. Базисное решение.
Любые m переменных системы m линейных уравнений с n переменными (m < n) называются основными, если определитель матрицы коэффициентов при них отличен от нуля. Тогда остальные m-n переменных называются неосновными (или свободными). Базисным решением системы m линейных уравнений c n переменными (m < n) называется всякое ее решение, в котором все неосновные переменные имеют нулевые значения.
10. Системы линейных однородных уравнений и её решения.Условия существования ненулевых решений системы.
Системы линейных однородных уравнений.
Система m линейных уравнений с n переменными называется системой линейных однородных уравнений, если все их свободные члены равны нулю. Такая система имеет вид:
Система линейных однородных уравнений всегда совместна, так как она всегда имеет, по крайней мере, нулевое (или тривиальное) решение (0; 0;...; 0).
Систему (8) можно записать а виде:
А*Х=0 (9).
Если в системе (8) m=n, а ее определитель отличен от нуля, то такая система имеет только нулевое решение, как это следует из теоремы и формул Крамера. Ненулевые решения, следовательно, возможны лишь для таких систем линейных однородных уравнений, в которых число уравнений меньше числа переменных или при их равенстве, когда определитель системы равен нулю.
Иначе: система линейных однородных уравнений имеет ненулевые решения тогда и только тогда, когда ранг ее матрицы коэффициентов при переменных меньше числа переменных, т.е. при r(A)<n.
11. Векторы на плоскости и в пространстве (геометрические векторы). Линейные операции над векторами(сложение,умножение вектора на число).Коллинеарные и компланарные векторы.
Вектором называется направленный отрезок, имеющий определенную длину, т. е. отрезок определенной длины, у которого одна из ограничивающих его точек принимается за начало, а вторая — за конец.
Если А — начало вектора и В — его конец, то вектор обозначается символом 
Обычно векторы обозначают одной малой латинской буквой со стрелкой либо выделяют жирным шрифтом:  , a.
, a.
Вектор изображается отрезком со стрелкой на конце:
Длина вектора называется его модулем и обозначается символом 
Вектор , у которого  называется единичным.
называется единичным.
Вектор называется нулевым (обозначается  ), если начало и конец его совпадают.
), если начало и конец его совпадают.
Нулевой вектор не имеет определенного направления и имеет длину, равную нулю.
Векторы и  , расположенные на одной прямой или на параллельных прямых, называются коллинеарными. Нулевой вектор коллинеарен любому вектору.
, расположенные на одной прямой или на параллельных прямых, называются коллинеарными. Нулевой вектор коллинеарен любому вектору.
Два вектора и называются равными, если они коллинеарны, имеют одинаковую длину и одинаковое направление.
В этом случае пишут 
Все нулевые векторы считаются равными.
Из определения равенства векторов следует, что вектор можно переносить параллельно самому себе, помещая его начало в любую точку пространства (в частности, плоскости). Такой вектор называется свободным.
Два коллинеарных вектора (отличные от нулевых векторов), имеющие равные модули, но противоположно направленные, называются противоположными.
Вектор, противоположный вектору , обозначается  .
.
Для вектора противоположным является вектор  .
.
Векторы a1, a2,..., an называются компланарными, если каждый из них параллелен одной и той же плоскости.
Любые два вектора всегда компланарны.
Очевидно, если три вектора компланарны, то их можно изобразить направленными отрезками, лежащими в одной плоскости.
Сумма векторов
Пусть даны два вектора а = OA(вектор) и b = OB(вектор) (рис. 5).
От точки А отложим отрезок АС такой, что AС(вектор) = b. Тогда, вектор с = OС(вектор) называется суммой векторов а и b и обозначается а + b.
Таким образом, OA(вектор) + AС(вектор) = OС(вектор). Это равенство называют правилом треугольника сложения двух векторов.
Oчевидно, что это правило справедливо и в том случае, когда точки О, А и В лежат на одной прямой (рис. 6, 7). В частности, а + 0 = а.
Не нашли, что искали? Воспользуйтесь поиском: