ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Определение передаточной функции последовательного корректирующего устройства
Передаточную функцию последовательного корректирующего устройства найдем графическим методом, исходя из формулы:
 . (2.7)
. (2.7)
Для этого построим на одном графике ЛАЧХ исходной и желаемой систем, а затем графически вычтем из желаемой ЛАЧХ исходную, получим ЛАЧХ последовательного корректирующего устройства (рисунки 2.5 и 2.7).
В соответствии с рисунком 2.5 передаточная функция последовательного корректирующего устройства будет иметь вид:
 .
.
Однако на практике реализация такого корректирующего устройства невозможна в виду того, что порядок числителя получился больше порядка знаменателя, что физически неосуществимо. Для устранения этой проблемы из нескольких возможных вариантов выберу вариант (б), т.к. четвертая и пятая сопрягающие частоты корректирующего устройства отличаются более, чем в два раза:
 ,
,
кроме того, ЛАЧХ желаемой характеристики на этих частотах проходит ниже оси абсцисс, что соответствует ослаблению сигнала на данных частотах, значит, выходной сигнал на пятой сопрягающей частоте будет ослаблен настолько, что всеми частотами, большими этой частоты, можно пренебречь. Тогда передаточная функция последовательного корректирующего устройства примет вид:
 . (2.8)
. (2.8)
.
Рисунок 2.5 — Определение ЛАЧХ последовательного корректирующего устройства
Для оценки качества скорректированной системы составим структурную схему (рисунок 2.7) и получим переходной процесс (рисунок 2.8).
Как видно из графика на рисунке 2.8, качество переходного процесса ухудшилось по сравнению с желаемой характеристикой. Вызвано это тем, что были отброшены звенья с малыми постоянными времени, и тем самым это поспособствовало расхождению желаемой характеристики от скорректированной. Попытаемся избавиться от негативного влияния произведенной операции путем поднастройки определенных параметров корректирующего устройства. Для этого сначала реализуем корректирующее устройство на RC-цепочках.
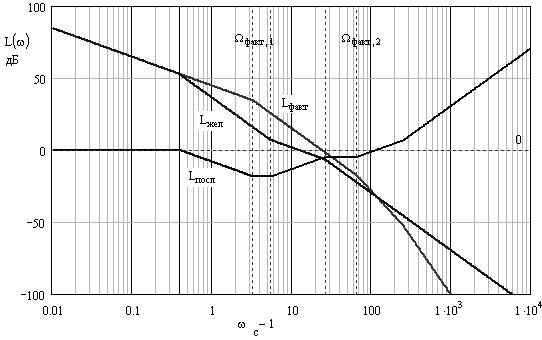
Рисунок 2.6 — Определение ЛАЧХ последовательного корректирующего устройства с использованием среды MathCad

Рисунок 2.7 — Структурная схема системы, скорректированной последовательным корректирующим устройством
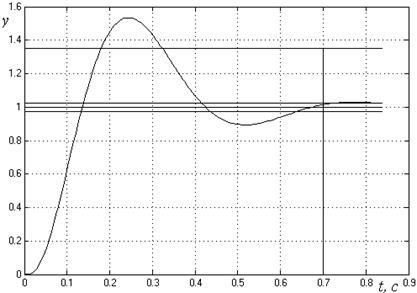
Рисунок 2.8 — График переходного процесса в системе, скорректированной последовательным корректирующим звеном
Не нашли, что искали? Воспользуйтесь поиском: