ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Движения материальной точки
Шарик М, рассматриваемый как материальная точка, перемещается по цилиндрическому каналу движущегося тела А (рис. 13-15). Найти уравнение относительного движения этого шарика х = f (t), приняв за начало отсчета точку О.
Тело А равномерно вращается вокруг неподвижной оси (в вариантах 2, 3, 4, 7, 10, 11, 14, 20, 23, 26 и 30 ось вращения  вертикальна, в вариантах 1, 12, 15 и 25 ось вращения
вертикальна, в вариантах 1, 12, 15 и 25 ось вращения  горизонтальна). В вариантах 5, 6, 8, 9, 13, 16, 17, 18, 19, 21, 22, 24, 27, 28 и 29 тело А движется поступательно, параллельно вертикальной плоскости
горизонтальна). В вариантах 5, 6, 8, 9, 13, 16, 17, 18, 19, 21, 22, 24, 27, 28 и 29 тело А движется поступательно, параллельно вертикальной плоскости  .
.
Найти также координату х и силу давления шарика на стенку канала при заданном значении  . Данные, необходимые для выполнения 30-ти вариантов задания, приведены в табл. 2.
. Данные, необходимые для выполнения 30-ти вариантов задания, приведены в табл. 2.
В задании приняты следующие обозначения: т − масса шарика М;  − постоянная угловая скорость тела А (в вариантах 1−4, 7, 10−12, 14, 15, 20, 23, 25, 26, 30) или кривошипов
− постоянная угловая скорость тела А (в вариантах 1−4, 7, 10−12, 14, 15, 20, 23, 25, 26, 30) или кривошипов  В и
В и  С (в вариантах 6, 17, 22); с − коэффициент жесткости пружины, к которой прикреплен шарик М;
С (в вариантах 6, 17, 22); с − коэффициент жесткости пружины, к которой прикреплен шарик М;  − длина недеформированной пружины; f − коэффициент трения скольжения шарика по стенке канала;
− длина недеформированной пружины; f − коэффициент трения скольжения шарика по стенке канала;  − начальная координата и проекция начальной скорости на ось х.
− начальная координата и проекция начальной скорости на ось х.
Пример выполнения задания (рис. 16). Дано:  рад/с;
рад/с;  30°; т = 0,05 кг;
30°; т = 0,05 кг;  = 0,1 с;
= 0,1 с;  = 0,2 м;
= 0,2 м;  = 0 м/с;
= 0 м/с;  0,01 Н/cм;
0,01 Н/cм;  м. Найти уравнение
м. Найти уравнение  относительного движения шари-
относительного движения шари-
ка М, а также координату x и силу давления шарика на стенку канала при заданном .
Решение. Свяжем подвижную систему отсчета  с телом А, вращающимся вокруг неподвижной оси . При этом ось
с телом А, вращающимся вокруг неподвижной оси . При этом ось  направлена вдоль прямолинейного канала, по которому совершает относительное движение шарик М, в сторону удлинения пружины.
направлена вдоль прямолинейного канала, по которому совершает относительное движение шарик М, в сторону удлинения пружины.
Переносным движением для шарика М является вращение подвижной системы отсчета вместе с телом А вокруг оси .
Относительное движение шарика М как материальной точки описывается векторным уравнением
 . (1)
. (1)
К шарику M приложены: сила тяжести  , нормальная реакция
, нормальная реакция  стенки канала, которую целесообразно разложить на две взаимно перпендикулярные составляющие
стенки канала, которую целесообразно разложить на две взаимно перпендикулярные составляющие  и
и  , сила упругости
, сила упругости  пружины.
пружины.
Модуль силы упругости определяется следующим образом:
 ,
,
где  деформация пружины (при этом полагается, что в текущем положении шарика его координата в подвижной системе отсчета положительна, т. е. >0, а пружина растянута).
деформация пружины (при этом полагается, что в текущем положении шарика его координата в подвижной системе отсчета положительна, т. е. >0, а пружина растянута).
На относительное движение шарика М влияет перемещение подвижной системы отсчета и тела А, с которым эта система связана. Это влияние учитывается введением переносной  и кориолисовой
и кориолисовой  сил инерции.
сил инерции.
Переносная сила инерции направлена противоположно переносному ускорению  :
:
 .
.
При равномерном переносном вращении тела A вокруг оси  ускорение равно центростремительному ускорению
ускорение равно центростремительному ускорению  точки М тела A. При этом модуль переносной силы инерции находится по формуле
точки М тела A. При этом модуль переносной силы инерции находится по формуле  . Кориолисова сила инерции определяется из векторного выражения
. Кориолисова сила инерции определяется из векторного выражения

где  кориолисово ускорение;
кориолисово ускорение;  вектор угловой
вектор угловой
скорости переносного вращения, направленный вдоль оси z1 в соот-
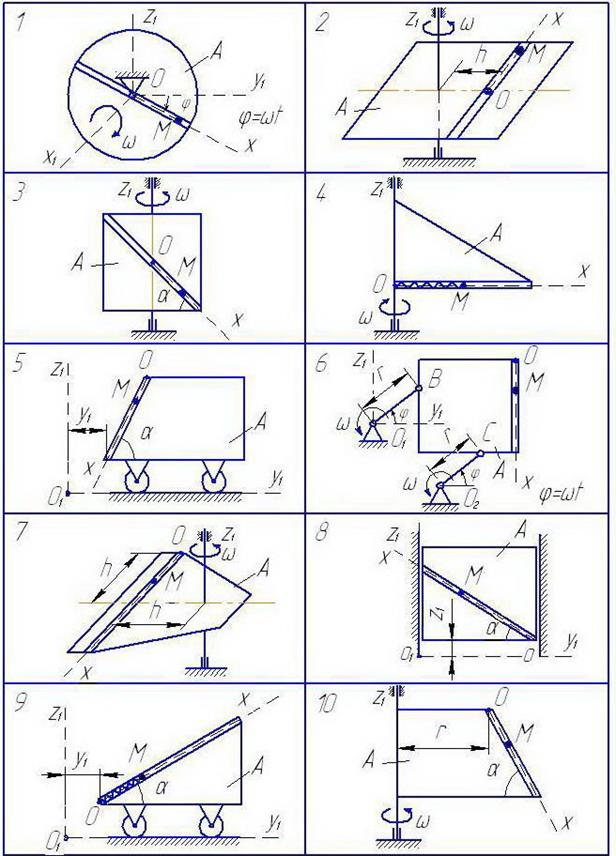
Рис. 13
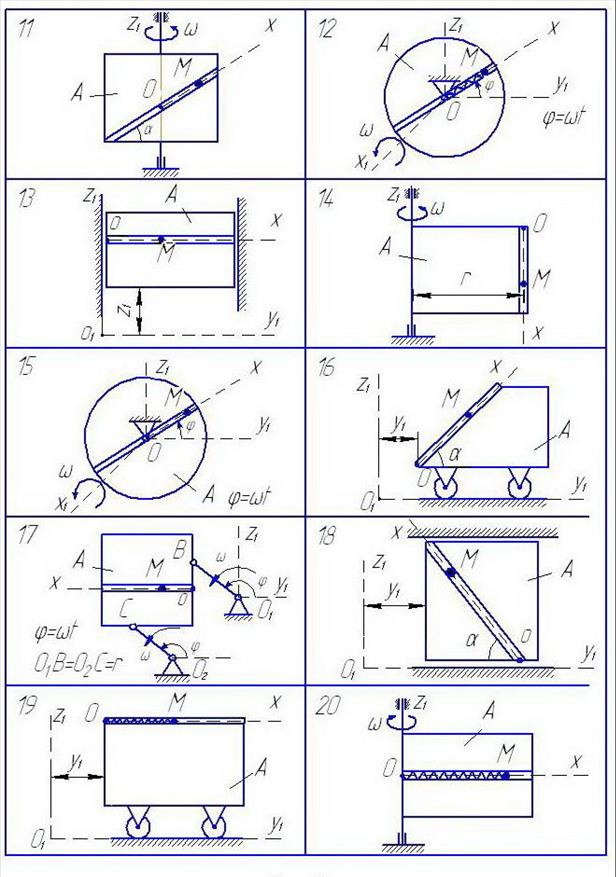
Рис. 14

Рис. 15



Рис. 16
ветствии с круговой стрелкой  ;
;  вектор относительной скорости шарика М (в текущий момент времени полагается, что проекция скорости
вектор относительной скорости шарика М (в текущий момент времени полагается, что проекция скорости  на ось положительна, т. е.
на ось положительна, т. е.  >0). Направление вектора кориолисова ускорения
>0). Направление вектора кориолисова ускорения  определяется в соответствии с правилом векторного произведения
определяется в соответствии с правилом векторного произведения  : вектор направлен перпендикулярно плоскости
: вектор направлен перпендикулярно плоскости  , содержащей перемножаемые векторы
, содержащей перемножаемые векторы  и , в ту сторону, откуда кратчайший поворот вектора до совмещения с вектором виден происходящим против хода часовой стрелки. Кориолисова сила инерции
и , в ту сторону, откуда кратчайший поворот вектора до совмещения с вектором виден происходящим против хода часовой стрелки. Кориолисова сила инерции  направлена противоположно кориолисову ускорению и по модулю равна
направлена противоположно кориолисову ускорению и по модулю равна
 °
° 
 .
.
Основное уравнение динамики относительного движения материальной точки (шарика М) в данном случае имеет вид
 . (2)
. (2)
Проектируя векторное уравнение (2) на ось , получим дифференциальное уравнение относительного движения шарика М вдоль оси :
 ;
;

или
 . (3)
. (3)
Уравнение (3) является линейным неоднородным дифференциальным уравнением второго порядка с постоянными коэффициентами, общее решение которого имеет вид
 ,
,
где
 − общее решение соответствующего однородного уравнения
− общее решение соответствующего однородного уравнения  ;
;
 − частное решение уравнения (3).
− частное решение уравнения (3).
Составим характеристическое уравнение и найдем его корни:
 ;
;
 .
.
Поскольку корни  и
и  характеристического уравнения являются действительными различными числами
характеристического уравнения являются действительными различными числами  и
и  , общее решение записывается в виде
, общее решение записывается в виде
 .
.
Частное решение дифференциального уравнения (3) находим в форме  .
.
Подставляя в уравнение (3), находим:

 ,
,
откуда
 м.
м.
Общее решение дифференциального уравнения (3) относительного движения шарика М получает вид
 . (4)
. (4)
Для определения постоянных интегрирования  и
и  формируем, кроме того, функцию
формируем, кроме того, функцию  :
:
 . (5)
. (5)
Подставляя начальные условия (t = 0;  м;
м;  )
)
в уравнения (4) и (5), получим:
 ;
;
 ,
,
откуда
 м.
м.
Уравнение относительного движения шарика М принимает вид
 (м), (6)
(м), (6)
а скорость его относительного движения выражается следующим образом:
 (м/с). (7)
(м/с). (7)
Для определения модулей составляющих и реакции стенки трубки при t = = 0,1 с выразим векторное уравнение (1) в проекциях на оси y и z. Учитывая, что вектор  перпендикулярен этим осям, получаем:
перпендикулярен этим осям, получаем:
 ;
;
 .
.
Из этих уравнений находим
 ;
;
 .
.
Для получения числовых значений N 1 и N 2 найдем координату
и проекцию относительной скорости  шарика в заданный момент
шарика в заданный момент
времени  с:
с:  м;
м;
 м/с.
м/с.
Тогда

 0,6 Н;
0,6 Н;

 Н.
Н.
Реакция стенки трубки
 Н.
Н.
Искомая сила давления  шарика M на стенку канала по модулю равна найденной реакции и направлена в противоположную сторону (
шарика M на стенку канала по модулю равна найденной реакции и направлена в противоположную сторону ( ).
).
Ответ: (м);  м;
м;  Н.
Н.
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ МАТЕРИАЛЬНОЙ
ТОЧКИ
Не нашли, что искали? Воспользуйтесь поиском: