ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Механической системы
Механическая система под действием сил тяжести приходит в движение из состояния покоя; начальное положение системы показано на рис. 29 − 33. Учитывая трение скольжения тела 1 (варианты 1 − 3, 5, 6, 8 − 12, 17 − 23, 28 − 30) и сопротивление качению тела 3, катящегося без скольжения (варианты 2, 4, 6 − 9, 11, 13 − 15, 20, 21, 24, 27, 29), пренебрегая другими силами сопротивления и массами нитей, предполагаемых нерастяжимыми, определить скорость тела 1 в тот момент, когда пройденный им путь станет равным s.
В задании приняты следующие обозначения: m 1, m 2, m 3, m 4 − массы тел 1, 2, 3, 4; R 2, r 2, R 3, r 3 − радиусы больших и малых окружностей колес; i 2 x, i 3 ξ – радиусы инерции тел 2 и 3 относительно горизонтальных осей, проходящих через их центры масс; α, β − углы наклона плоскостей к горизонту; f − коэффициент трения скольжения;
δ − коэффициент трения качения.
Необходимые для решения данные приведены в табл. 6. Блоки и катки, для которых радиусы инерции в таблице не указаны, считать сплошными однородными дисками. В вариантах 17, 26 и 28 шатун 3 рассматривать как тонкий однородный стержень.
Наклонные участки нитей параллельны соответствующим наклонным плоскостям.
Пример выполнения задания (рис. 34). Дано:  − масса груза 1,
− масса груза 1,  ,
,  ,
,  , r2 = R3 = 10 см, α = 60°, f = 0,1, s = 0,05π м. Массой кривошипа (водила) ОС пренебречь. На рис. 34, а показана механическая система в начальном положении.
, r2 = R3 = 10 см, α = 60°, f = 0,1, s = 0,05π м. Массой кривошипа (водила) ОС пренебречь. На рис. 34, а показана механическая система в начальном положении.
Найти  – скорость груза 1 в положении, соответствующем его перемещению на заданное расстояние
– скорость груза 1 в положении, соответствующем его перемещению на заданное расстояние  .
.
Решение. Объект исследования – механическая система связанных тел: груз 1, канат, колесо 2 и сателлитный механизм, состоящий
 Рис. 29
Рис. 29
 Рис. 30
Рис. 30
 Рис. 31
Рис. 31
 Рис. 32
Рис. 32
 Рис. 33
Рис. 33
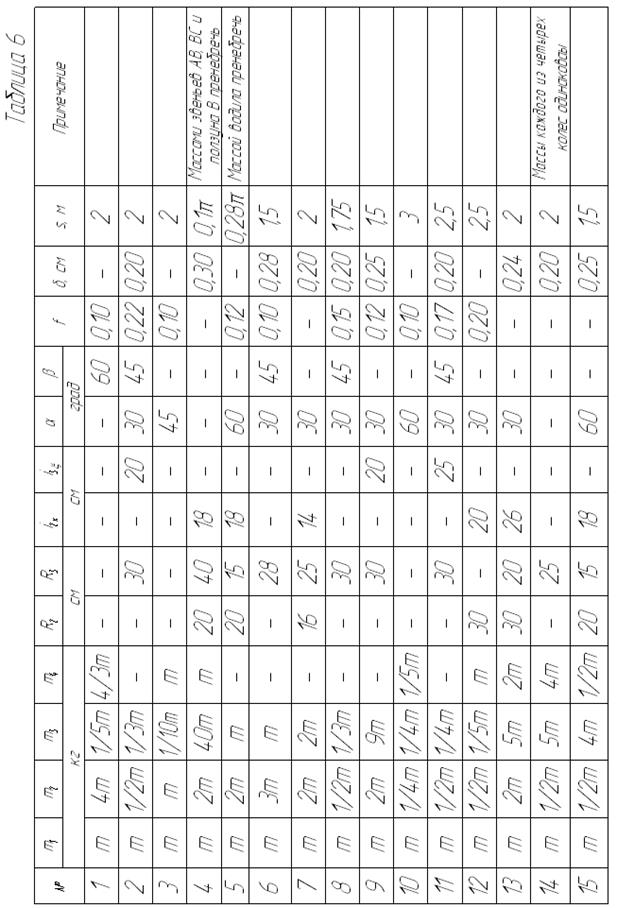
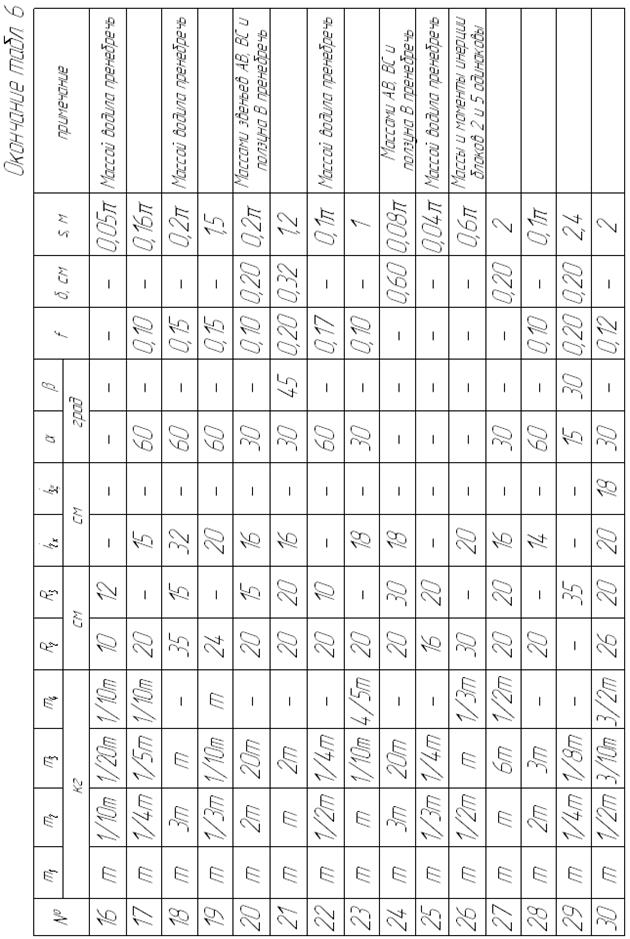
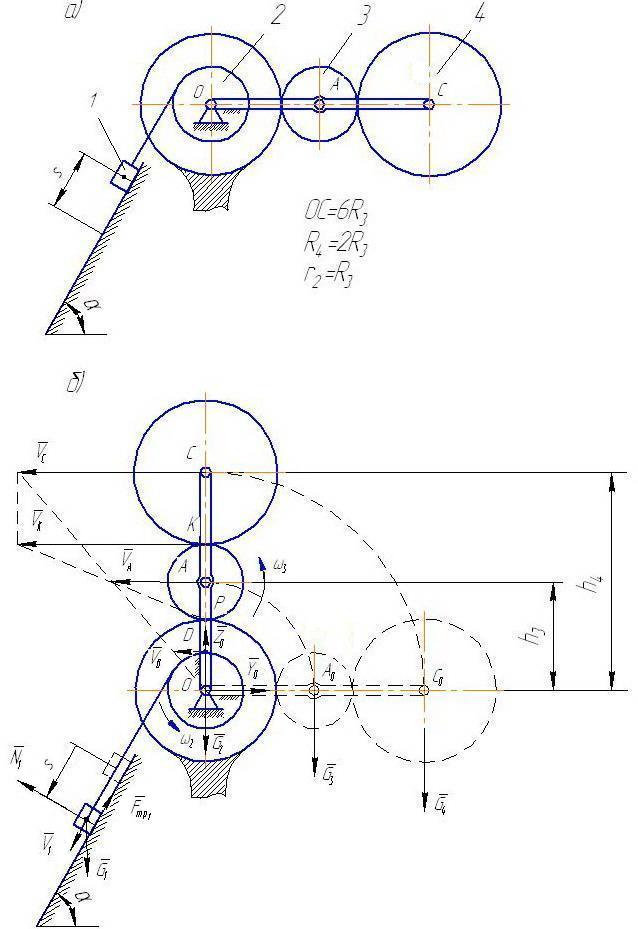 Рис. 34
Рис. 34
из кривошипа ОС, неподвижного колеса и колес 3, 4 с подвижными осями. Применим теорему об изменении кинетической энергии системы:
 , ,
| (1) |
где  и Т — кинетическая энергия системы в начальном и конечном
и Т — кинетическая энергия системы в начальном и конечном
положениях;  и
и  − сумма работ всех внешних и внутренних сил, приложенных к системе, на соответствующих перемещениях их точек приложения.
− сумма работ всех внешних и внутренних сил, приложенных к системе, на соответствующих перемещениях их точек приложения.
Для рассматриваемой системы, состоящей из абсолютно твердых тел, связанных нерастяжимым канатом,
 . .
|
В начальном положении система находится в покое, поэтому Т 0 = 0. Следовательно, уравнение (1) принимает вид:
 . .
| (2) |
Выразим кинетическую энергию  рассматриваемой системы через искомую скорость груза 1, а сумму работ
рассматриваемой системы через искомую скорость груза 1, а сумму работ  внешних сил, приложенных к системе, − через его заданное перемещение .
внешних сил, приложенных к системе, − через его заданное перемещение .
Кинетическая энергия системы Т в конечном ее положении (рис. 34, б)равна сумме кинетических энергий тел 1, 2,3, 4:
 . (3)
. (3)
Кинетическая энергия поступательно движущегося груза 1
 . (4)
. (4)
Кинетическая энергия колеса 2, вращающегося вокруг неподвижной оси Ох,
 , (5)
, (5)
где  момент инерции колеса 2 относительно его центральной оси
момент инерции колеса 2 относительно его центральной оси  ;
;  − угловая скорость колеса 2.
− угловая скорость колеса 2.
Скорость  точки D колеса 2 равна скорости груза 1, поскольку нить, соединяющая груз и колесо, является нерастяжимой и не скользит по ободу колеса.
точки D колеса 2 равна скорости груза 1, поскольку нить, соединяющая груз и колесо, является нерастяжимой и не скользит по ободу колеса.
Тогда  ,
,  и выражение для кинетической энергии колеса 2 примет вид:
и выражение для кинетической энергии колеса 2 примет вид:
 . (6)
. (6)
Кинетическая энергия колеса 3, совершающего плоское движение,
 , (7)
, (7)
где  скорость центра масс колеса 3;
скорость центра масс колеса 3;  момент инерции колеса относительно его центральной оси
момент инерции колеса относительно его центральной оси  как сплошного однородного диска;
как сплошного однородного диска;  угловая скорость колеса.
угловая скорость колеса.
Выразим величины  и
и  через скорость . Центр масс
через скорость . Центр масс  колеса 3 совпадает с точкой А кривошипа ОС, жестко связанного с колесом 2 и вращающегося с угловой скоростью
колеса 3 совпадает с точкой А кривошипа ОС, жестко связанного с колесом 2 и вращающегося с угловой скоростью  , поэтому
, поэтому
 . (8)
. (8)
Так как колесо 3 катится без скольжения по неподвижному контуру, то мгновенный центр скоростей этого колеса находится в точке Р контакта с контуром,следовательно,
 . (9)
. (9)
После подстановки (8) и (9) в выражение (7) получим
 .
.
Таким образом,
 . (10)
. (10)
Для определения кинетической энергии колеса 4 найдем скорость центра масс  и угловую скорость
и угловую скорость  этого колеса.
этого колеса.
Центр масс колеса 4 совпадает с точкой С кривошипа ОС,
поэтому скорость этого центра равна
 . (11)
. (11)
При этом вектор  направлен перпендикулярно кривошипу OC в соответствии с круговой стрелкой .
направлен перпендикулярно кривошипу OC в соответствии с круговой стрелкой .
Скорость  точки К контакта колеса 4 с колесом 3
точки К контакта колеса 4 с колесом 3
 ,
,
то есть по модулю равна скорости  и направлена так же, как и вектор
и направлена так же, как и вектор  . Таким образом, векторы скоростей двух точек
. Таким образом, векторы скоростей двух точек  и
и  колеса 4, совершающего движение в плоскости, геометрически равны:
колеса 4, совершающего движение в плоскости, геометрически равны:  , откуда следует, что угловая скорость колеса
, откуда следует, что угловая скорость колеса  , т. е. оно совершает криволинейное поступательное движение.
, т. е. оно совершает криволинейное поступательное движение.
Тогда кинетическая энергия колеса 4
 . (12)
. (12)
Кинетическая энергия всей механической системы определяется по формуле (3) с учетом выражений (4), (6), (10), (12)
 .
.
Подставляя сюда заданные значения масс, получаем:
 . (13)
. (13)
Найдем сумму работ всех внешних сил, приложенных к системе, на заданном ее перемещении. Покажем приложенные к системе внешние силы: силы тяжести  груза и колес, нормальную реакцию
груза и колес, нормальную реакцию  наклонной плоскости, силу трения скольжения
наклонной плоскости, силу трения скольжения  и составляющие
и составляющие  ,
,  реакции опоры О (рис. 34, б).
реакции опоры О (рис. 34, б).
Работа силы тяжести 
 . (14)
. (14)
Работа нормальной реакции  как силы, перпендикулярной перемещению точки ее приложения, равна нулю.
как силы, перпендикулярной перемещению точки ее приложения, равна нулю.
Работа силы трения скольжения 
 .
.
Так как

то
 . (15)
. (15)
Работа сил  , точка О приложения которых является неподвижной, равна нулю.
, точка О приложения которых является неподвижной, равна нулю.
Для определения работ сил  и
и  найдем угол
найдем угол  поворота кривошипа ОС, соответствующий перемещению груза 1. Для этого
поворота кривошипа ОС, соответствующий перемещению груза 1. Для этого
выражение для угловой скорости  кривошипа
кривошипа
 ,
,
с учетом того, что  и
и  , приведем к виду
, приведем к виду
 ,
,
откуда получим
 .
.
После интегрирования при нулевых начальных условиях
( ) найдем, что
) найдем, что
 .
.
При перемещении груза 1 по наклонной плоскости на расстояние кривошип ОС повернется на угол
и переместится из начального горизонтального положения  в вертикальное
в вертикальное  , а точки А и С приложения сил тяжести и совершат вертикальное перемещение соответственно на высоту
, а точки А и С приложения сил тяжести и совершат вертикальное перемещение соответственно на высоту

и
 .
.
Работы сил тяжести и при этом составят:
 , (16)
, (16)
 . (17)
. (17)
Сумма работ внешних сил определится сложением работ, вычисленных по формулам (14) − (17):
 .
.
Подставляя исходные данные, получим:

 . (18)
. (18)
Согласно выражению (2) приравняем значения Т и , определяемые по формулам (13) и (18):
 ,
,
откуда
 м/с.
м/с.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
ТВЕРДОГО ТЕЛА
Не нашли, что искали? Воспользуйтесь поиском: